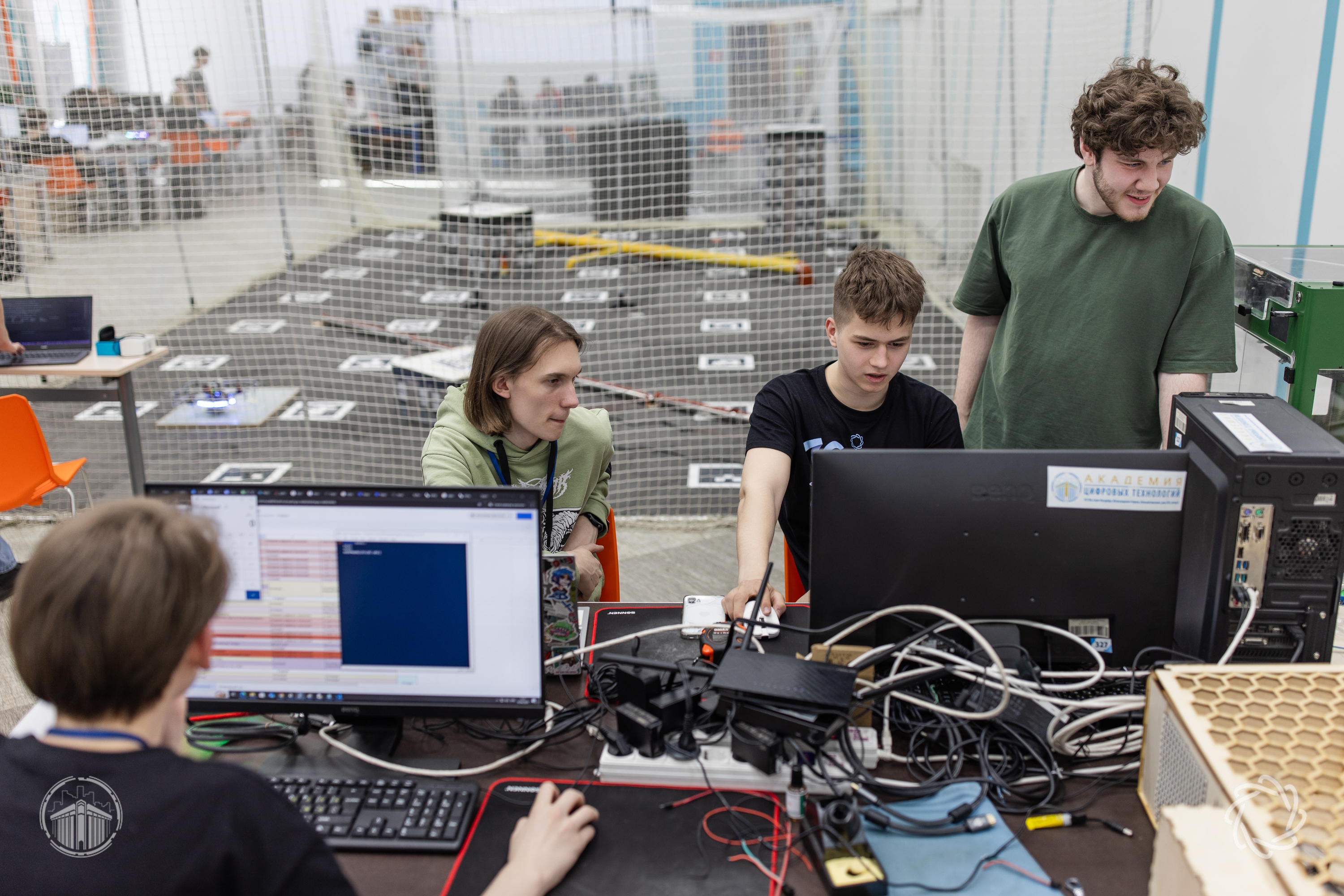
Профиль посвящен практике в области автоматизации управления квадрокоптерами при помощи компьютерного зрения, включая автоматический сбор, обработку и анализ данных. Участники разрабатывают систему автоматизированного мониторинга объектов топливно-энергетического комплекса с использованием квадрокоптера.
«Задание с тепловизором было интересным за счёт своей новизны. Пришлось осваивать непривычное оборудование и разбираться с обработкой тепловизионных данных — это позволило глубже понять, как применять такие технологии в реальных задачах и интегрировать их с другими системами».
Владислав Обрадович. 2024/2025. Финалист
«В этом году дали интересную задачу, охватывающую множество необходимых для решения навыков: от электроники до веба. Организация была на высоком уровне».
Арсений Лиунша. 2024/2025. Победитель









Участникам предстоит решать два тура:
Также участники пройдут образовательный курс, чтобы получить или подтвердить основные компетенции.
Для решения задач II этапа необходимо собрать команду: чем сплоченнее она будет, тем выше шансы на успех в финале.
Участники будут решать подзадачи финала, разделённые по ролям. Например, программировать блок управления на Python, заниматься программной настройкой оборудования и автономным полетом квадрокоптера, обрабатывать данные при помощи компьютерного зрения, проектировать 3D моделей в CAD системах, делать расчеты в CAE системах.
Работа над задачами II этапа и изучение образовательных материалов профиля помогут участникам подготовиться к финалу.
Финалистам предстоит решить предметный тур по физике и информатике.
Задача инженерного тура заключается в разработке системы автоматизированного мониторинга объектов ТЭК при помощи квадрокоптера:
Начиная со II этапа участникам необходимо объединиться в команды из 3-4 человек. Тем, у кого команды нет, организаторы помогут ее найти (подробнее о командообразовании и том, как искать команду).
Чем больше компетенций в команде, тем выше ее эффективность.
Физика: электрический ток: сущность, определение, источники тока; сила тока, электрическое напряжение, сопротивление: определение, формулы, измерение; закон Ома; последовательное и параллельное соединение проводников; электрическая цепь и составные ее части; определение координат движущегося тела; относительность движения.
Информатика: основы алгоритмизации и объектно-ориентированного программирования; структуры хранения и обработки данных; компьютерная графика; реляционные базы данных и СУБД (системы управления базами данных); методы обработки массивов; компьютерная графика; механизмы обработки исключений; построение графиков; работа с библиотеками.
Базовые навыки работы с ROS.
Базовые навыки работы с летающими робототехническими системами.
Базовые навыки работы с компьютерным зрением.
Навыки 3D-моделирования.
Программирование на Python.
Front-end разработка.
Основы программирования на С++.
Навыки работы с ROS.
Навыки работы с летающими робототехническими системами.
Навыки работы с базами данных.
Базовые навыки работы с компьютерным зрением.
Навыки работы с электрическими схемами.
Навыки работы с паяльником и ручным инструментом.
Пилотирование, предполетная подготовка и техобслуживание летающей робототехнической системы.
Для участия во II и заключительном этапах понадобится команда из 3-4 человек:
Роль 1. Инженер-программист (Python, Front-end) — работает с визуализацией и автоматизированной отправкой результатов мониторинга, пишет код для автономного полета квадрокоптера, разрабатывает алгоритм безопасного полета квадрокоптера.
Роль 2. Инженер-программист (С++, Python) — работает с алгоритмами компьютерного зрения и искусственного интеллекта для реализации автономных миссий квадрокоптера и датчиками. Работа в связке с ролью 1.
Роль 3. Инженер-техник — моделирует и разрабатывает автономный комплекс и полезную нагрузку, обеспечивающую эффективный мониторинг объектов ТЭК, работает с датчиками, тестирует, занимается техобслуживанием и пилотированием квадрокоптера.
Роль 4. Капитан/лидер команды — организует работу команды в GitHub (или аналоге), руководит, распределяет обязанности и контролирует соблюдение дедлайнов. Рекомендуется совмещение данной роли с другими ролями.
Документация и учебник по платформе «Клевер»
Образовательный блок. Летающая робототехника 24/25
Курс «Arduino для начинающих»
Основы программирования на С
Основы робототехники под управлением Robot Operating System (ROS)
Базовый курс по Robot Operating System (ROS)
Программирование на Python
Все уроки по Ардуино
Компьютерное зрение. Базовый уровень
Сквозные технологии. Электроника
Сквозные технологии. 3D-моделирование в САПР
Сквозные компетенции. 3D-моделирование
Введение в программирование (C++)
Быстрый старт в спортивное программирование
Программирование на языке С++ для решения олимпиадных задач
Введение в Robot Operating System
Подготовка к 1 отборочному этапу НТО по информатике
Программируем Arduino
Введение в ROS
Разработка умных устройств на базе Arduino
Основы Git
Нейронные сети и компьютерное зрение
Сборник задач НТО. Летающая робототехника 2024/2025 гг.