Даты II этапа по некоторым профилям могут отличаться. С точными сроками проведения этапа можно ознакомиться в Личном кабинете участника на платформе «Талант».
Создайте оборудование для планетохода и протестируйте его в условиях космической миссии!
Профиль посвящён инженерии планетоходов и космической робототехнике. Участники проектируют и программируют навесное оборудование для роверов, тестируют его в условиях, приближенных к реальным космическим миссиям.
В работе используются современные технологии: ROS, Python, микроконтроллеры STM32, 3D-моделирование в САПР. Всё это — инструменты, с которыми работают инженеры в космических конструкторских бюро.
Участники учатся распределять роли в команде, отлаживать сложные системы и принимать инженерные решения, как настоящие разработчики. Советуем школьникам, которые мечтают о карьере в космической отрасли, начать с этого профиля.
«Профиль "Аэрокосмические системы" дает новые возможности: поступление по БВИ, знакомство с единомышленниками, применение знаний на практике, работа с новейшим оборудованием и многое другое. Участие в олимпиаде дает опыт в разработке навесного оборудования аппарата, в программировании уникальных плат, специально разработанных для данного профиля. Он открывает новые горизонты школьникам, жаждущим покорить космос!»
Арсений Куимов. 2025. Победитель
«Участие в "Аэрокосмических системах" НТО стало для меня ценным опытом, позволившим применить теоретические знания на практике. На финале я был именно в команде и работал в ней: мы вместе продумывали наше устройство, составляли планы, с ужасом смотрели на сроки, радовались и огорчались. После соревнований у меня остались только положительные эмоции, а также я приобрёл много практических навыков: прикладные знания в робототехнике, схемотехнике и программировании, а самое главное — умение работать в команде.
Если была бы возможность, то я бы обязательно вернулся на "Аэрокосмические системы" ещё раз и не только ради закрытия гештальта «стать победителем», но и за новыми, не менее яркими, эмоциями и впечатлениями. Спасибо организаторам НТО и организаторам "Аэрокосмических систем"».
Данила. 2025. Финалист
«Профиль "Аэрокосмические системы" научил меня качественно работать в очень сжатые сроки: нет времени переделывать, нужно сразу делать хорошо. Также на олимпиаде начинаешь понимать важный принцип командной работы: ошибка одного человека влечет за собой срыв работы всей команды. Поэтому я учился правильно взаимодействовать с сокомандниками и по рабочим, и по личным вопросам».
Олег. 2024, 2025. Финалист







Участникам предстоит решать два тура: инженерный и предметный.
Также участники пройдут образовательный курс по основам программирования роботов в ROS.
Для прохождения II этапа необходимо собрать команду.
Задачи будут разбиты на три категории для командных ролей:
Аэрокосмические системы — одна из самых сложных и комплексных компетенций, которая связана с базовыми навыками работы с ОС Linux и Robot Operating System (ROS). Для решения задач понадобится знание языка программирования Python, умение работать в специализированных САПР программах, а также знание платформы Arduino и STM32.
Работа над задачами II этапа и изучение образовательных материалов профиля помогут участникам подготовиться к финалу.
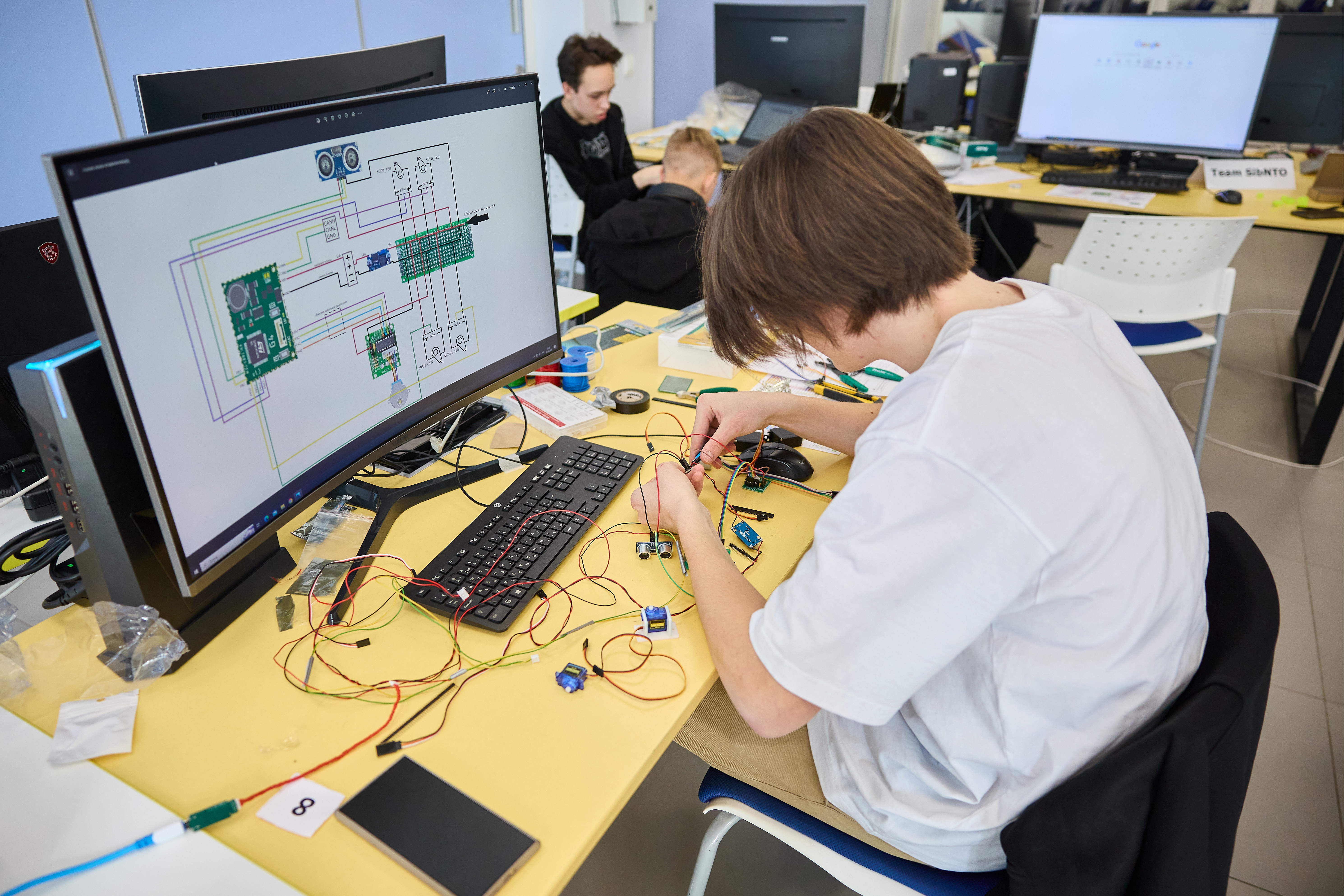
Командам предстоит разработать навесное оборудование для ровера-планетохода, написать необходимое для его функционирования ПО и выполнить задачу на полигоне.
Тематика заданий ежегодно меняется, но всегда связана с реальными задачами космических миссий — от инженерных до геологических.
Для работы организаторы предоставляют типовые электронные компоненты, модули и крепеж. Детали изготавливаются на станке лазерной резки из акрилового стекла 3-миллиметровой толщины.
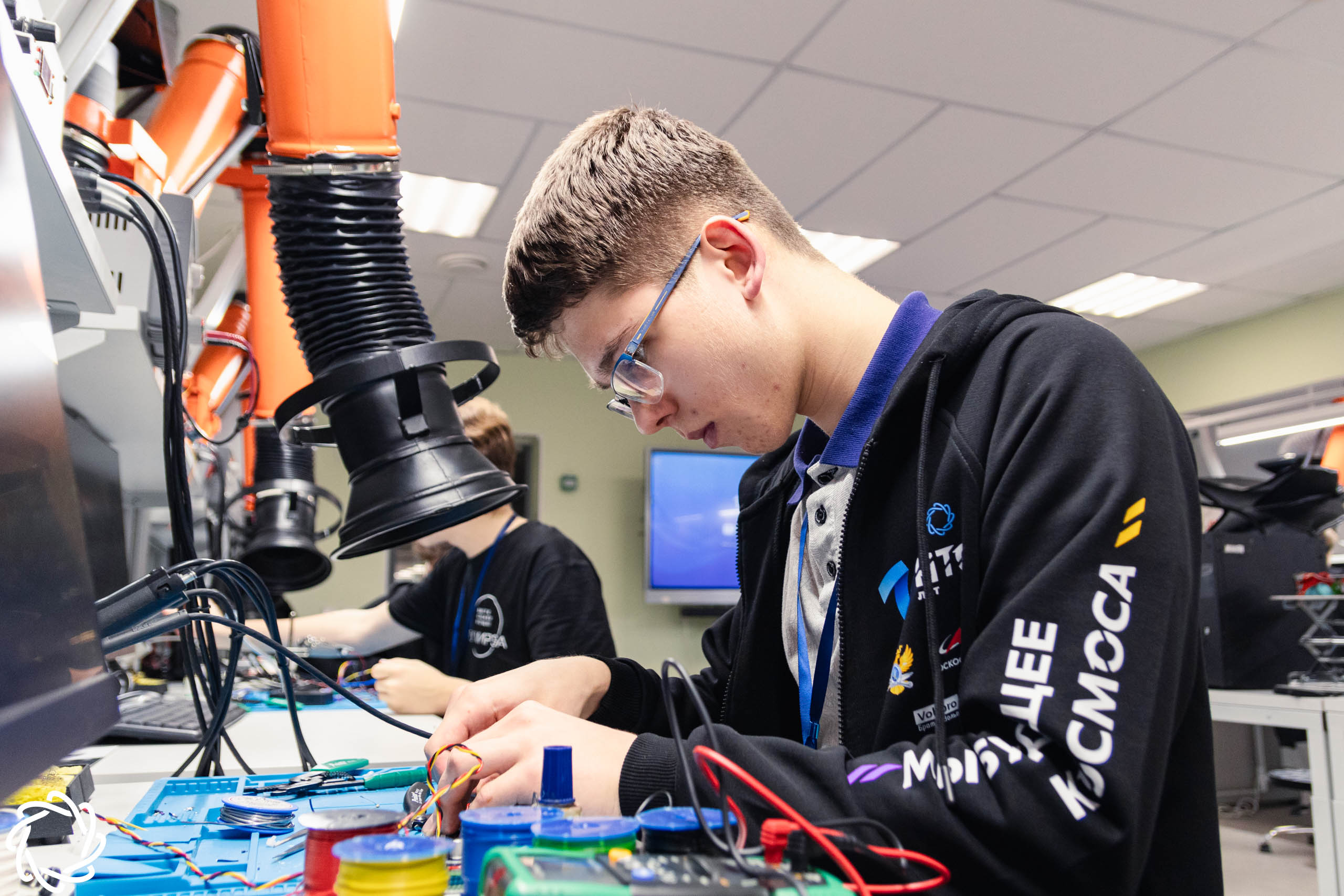
На полигоне финалисты должны продемонстрировать работу созданных ими систем навесного оборудования, связи и управления. Команды полностью самостоятельно проектируют, собирают, программируют и отлаживают оборудование. Участники получат оценку за совокупность решений и вольны выбирать любую конструкцию систем навесного оборудования для соответствующих задач.
Примеры заданий прошлых лет:
Начиная со II этапа участникам необходимо объединиться в команды. Тем, у кого команды нет, организаторы помогут её найти (подробнее о командообразовании и том, как искать команду).
Чем больше компетенций в команде, тем выше её эффективность.
На I этапе участникам понадобятся следующие компетенции:
Программирование на Python. Умение писать код на языке Python для решения задач управления движением робототехнической платформы, а также обработки данных с датчиков.
Работа с Linux. Понимание основ операционной системы Linux, чтобы запускать программы, управлять файлами и настраивать программное окружение для бортового компьютера робототехнической платформы.
Использование ROS (Robot Operating System). Способность настраивать взаимодействие между различными модулями ровера — например, камерой, датчиками и моторами — через единую программную платформу ROS, которая применяется в реальных роботах.
Программирование микроконтроллеров (Arduino, STM32). Умение загружать и отлаживать код на микроконтроллерах, чтобы управлять датчиками, двигателями и другими устройствами на борту.
Чтение электрических схем. Способность понимать, как соединены компоненты в электронной системе, по схеме и правильно собирать цепи без ошибок.
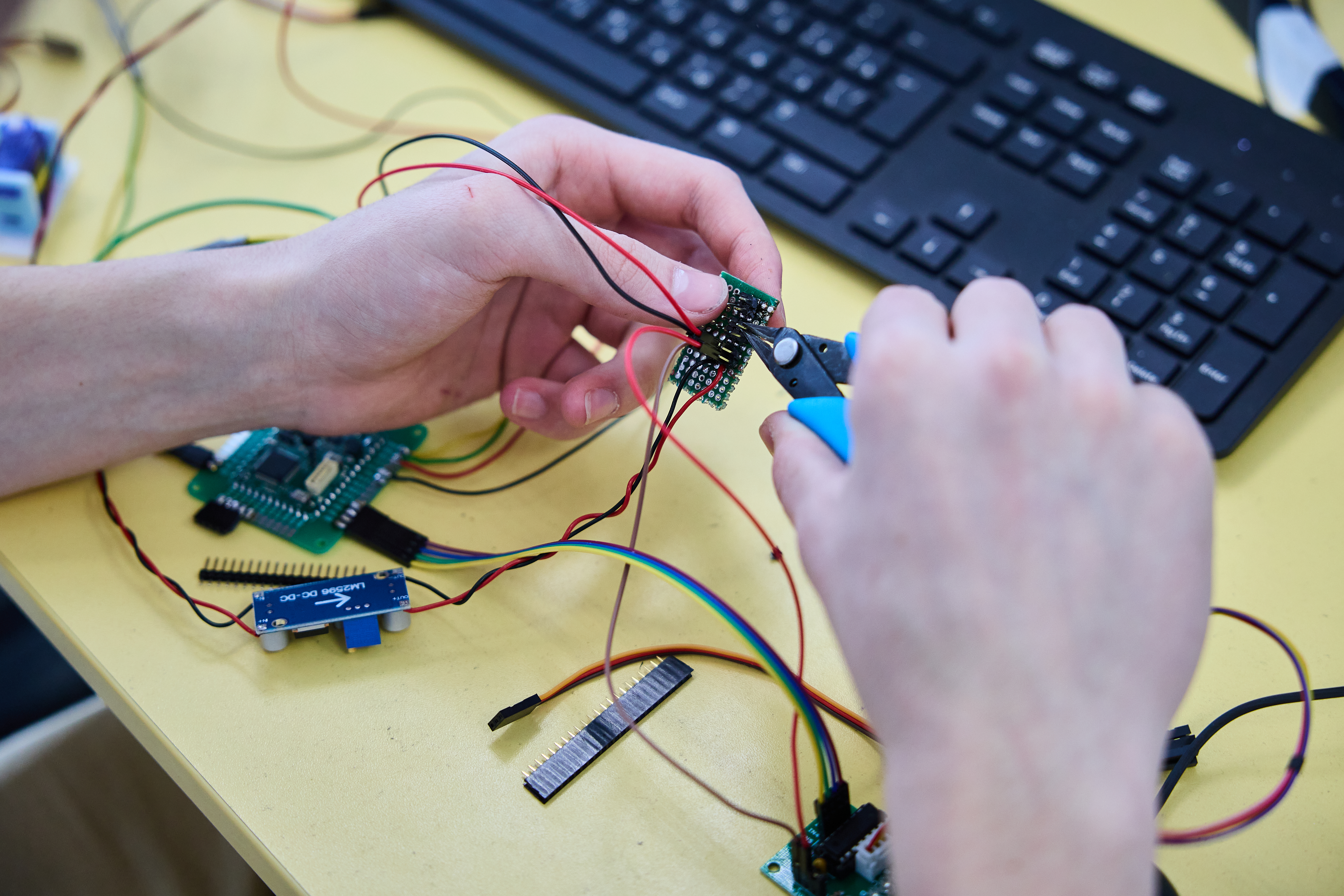
Пайка электронных компонентов. Навык аккуратного и надёжного соединения провода и детали с помощью паяльника, чтобы контакты не прерывались при выполнении миссии на сложной местности.
3D-моделирование. Умение создавать точные трёхмерные модели деталей корпуса, креплений и узлов, которые будут использоваться в реальной конструкции навесного оборудования.
Подготовка к 3D-печати. Знание, как адаптировать 3D-модель под печать: выбрать ориентацию, настроить заполнение и толщину стенок, чтобы деталь была лёгкой, но прочной.
Работа с датчиками и моторами. Понимание, как использовать различные типы сенсоров для ориентации в пространстве, а также как использовать различные типы сервоприводов и моторов постоянного тока.
Для участия во II и заключительном этапах вам понадобится команда из 3 человек:
3D-моделлер. Отвечает за проектирование и подготовку конструктивных элементов навесного оборудования САПР-систем. Создает 3D-модели деталей и узлов в программном обеспечении с учетом поставленной миссии и доступных компонентов. Подготавливает модели для 3D-печати и резке на лазерном станке с последующей интеграцией в общую конструкцию ровера.
Электронщик. Отвечает за проектирование, сборку и настройку электронных систем навесного оборудования. Разрабатывает электронные схемы на микроконтроллерах Arduino и STM32 для обработки данных по протоколу CAN FD. Осуществляет монтаж, пайку и диагностику электронных компонентов с учетом требований.
Программист. Отвечает за разработку программного обеспечения, обеспечивающего функционирование ровера и навесного оборудования. Реализует алгоритмы управления ровером и навесным оборудованием на языке Python с использованием среды Robot Operating System (ROS). Обеспечивает стабильное взаимодействие программного кода с бортовыми системами через операционную систему Linux.
Образовательный модуль по профилю Аэрокосмические системы
Развитие математического мышления для будущих инженеров
Курс "Моделирование в Компас-3D для начинающих"
Курс "3D-моделирование в Компас-3D v18.1"
Курс "3D-моделирование. Базовый уровень. Fusion 360"
НТО: сквозные технологии. Электроника.
Курс "Программируем Arduino"
Более подробная информация по Arduino
Курс Arduino+ROS
Базовый курс по ROS
Видео-курс по ROS
Что такое Robot Operating System?
Курс “Введение в Robot Operating System”
Официальная документация ROS
Основы робототехники под управлением Robot Operating System (ROS)
Программирование на Python
Книга “Фундаментальные основы Linux”
Информатика. Подготовка к олимпиадам по информатике
Вводный курс по профилю «Аэрокосмические системы»
НТО 21/22. Сквозные компетенции 3D
НТО: сквозные технологии. 3D-моделирование в САПР
Сборник задач НТО. Аэрокосмические системы. 2024/2025 гг.





























