
Инженерный тур. 3 этап
Участникам необходимо разработать микро-ТНПА (управляемый подводный аппарат с одним движителем и цифровой камерой), предназначенный для выполнения осмотровых работ при диагностике состояния морского судна, который может перемещаться в ограниченных пространствах и выполнять видеосъемку. Кроме того, нужно создать алгоритм классификации обрастаний на дне судна и обнаружения повреждений на основе полученного видеопотока.
Участники решают проблему автоматизации процесса проведения диагностических работ в реальных условиях. Они разрабатывают инструмент для проведения диагностических работ под водой и выполняют обработку результатов с применением методов компьютерного зрения.

Компании N необходимо устройство для экспресс-диагностики состояния судов, так как не всегда есть возможность привлечения водолазов для этих работ. Поэтому решено внедрить подводных роботов в качестве альтернативного способа диагностики.
В настоящий момент основными проблемами компании являются:
- анализ состояния дна морского судна;
- количество обрастаний на днище;
- исследования ограниченных областей в донной части, куда сложно зайти в полевых условиях.
Разработать микро-ТНПА, который будет иметь в своей конструкции цифровую камеру и независимый пульт управления. С помощью аппарата-носителя MiddleROV необходимо будет доставить микро-ТНПА до места исследования, определить тип обрастаний на корпусе морского судна. Затем с помощью микро-ТНПА нужно будет:
- провести исследование подводного шлюза;
- выявить повреждения;
- подсчитать количество повреждений (отверстий) в нем.
- Разработать микро-ТНПА.
- Разработать конструкцию микро-ТНПА (а именно, способ фиксации камеры в колбе, способ крепления движителя к колбе микро-ТНПА, способ транспортировки).
- Разработать программу управления микро-ТНПА с помощью пульта.
- Разработать программу для обработки видеопотока с микро-ТНПА: программу для классификации обрастаний на судне и определения повреждений в трубе.
- Выполнить миссию. В рамках миссии необходимо исследовать корпус судна, определив тип обрастания на нем, зайти в подводный шлюз и определить повреждения.
Рекомендуемый состав команды — 4 участника:
- конструктор: изготавливает корпус микро-ТНПА, крепление движителя, способ транспортировки микро-ТНПА с помощью MiddleROV;
- электронщик: собирает электрическую схему, припаивает компоненты на плату, разъем;
- программист микроконтроллеров: настраивает передачу данных между пультом управления и микро-ТНПА, настраивает управление мотором с помощью пульта;
- программист компьютерного зрения: пишет ПО для распознавания и классификации повреждений, определения отверстий в трубе.
Все электромонтажные и конструкторские работы выполняются в специальной рабочей зоне.
В рабочей зоне расположены необходимые инструменты и оборудования для осуществления электромонтажа (паяльные станции, расходные материалы, источники питания и т. д.) и для выполнения работ по конструированию (режущие инструменты, шлифовальные, измерительные и т. д.). В рабочей зоне размещается стол с дополнительными комплектующими и крепежом, которые могут быть использованы для решения задачи на усмотрение участников.
| Наименование | Описание |
|---|---|
| Arduino IDE https://www.arduino.cc/en/software | Для программирования глубиномера |
| САПР (например, SolidWorks и др.) | Для создания чертежа общего вида/ принципиальной схемы |
| MUR IDE https://murproject.com/#muride (рекомендуется) | Для отработки задания по компьютерному зрению |
| Паяльные станции (6 шт.) | Для пайки электронной части микро-ТНПА |
| Набор ручного инструмента (4 набора) | Для выполнения работ по разработке микро-ТНПА |
| ТНПА MiddleROV | Аппарат-носитель для транспортировки микро-ТНПА и выполнения миссии. |
- Командам необходимо привезти с собой свои ноутбуки для работы (не менее двух).
- Команда может привезти с собой собственный набор ручных инструментов, который сочтет достаточным для выполнения задания.
- Командам запрещено использовать собственные комплектующие для выполнения задания.
Для выполнения задания заключительного этапа каждая команда получает набор комплектующих от разработчиков профиля. Не рекомендуется приступать к использованию компонентов до объявления задания.
Команда полностью несет ответственность за сохранность своего набора. Все комплектующие прошли проверку и работоспособны. В случае, если команда повредила камеру, плату, драйверы, движитель или плату с микроконтроллером замена не предоставляется.
| № | Наименование | Кол-во |
|---|---|---|
| Гермоконтейнер | ||
| 1 | Купол (55 мм) | 1 |
| 2 | Крышка фланцевая передняя акрил | 1 |
| 3 | Крышка фланцевая задняя ПНД | 1 |
| 4 | Гильза | 1 |
| 5 | Кольцо прижимное алюминиевое | 2 |
| 6 | Шпильки резьбовые | 2 |
| 7 | Гайка М3 | 4 |
| 8 | Уплотнительное кольцо 45\(\times\)2,5 мм | 1 |
| 9 | Кольцо уплотнительное силиконовое красное \(OD=60\), \(cs=3{,}5\) | 2 |
| 10 | Герметичный кабельный ввод на 4 контакта M12-H4-02-SS | 1 |
| 11 | Кабельный ввод М6 + гайка | 1 |
| 12 | Разъем движителя Chasing Dory + стопорное кольцо | 1 |
| 13 | Комплект крепежа | Общий |
| Электроника | ||
| 1 | Драйвер E-MAX Bullet 12A | 1 |
| 2 | Микросхема MAX3232 | 1 |
| 3 | Модуль камеры CCDCAM IM50A01 IMX335 Gk7205 1,7 мм | 1 |
| 4 | Комплект крепежа камеры (винт М2\(\times\)10 + гайка М2 нейлон) \(\times\) 4 | 1 |
| 5 | Шлейф обжатый для подключения к камере Ethernet 10 Pin | 1 |
| 6 | Arduino Nano (ATmega328P) | 1 |
| 7 | Плата макетная | 1 |
| 8 | Конденсаторы керамические | Общий |
| 9 | Разъем/гребенка | Общий |
| 10 | Набор резисторов | Общий |
| 11 | Стабилизатор DC-DC Boost до 12В | 1 |
| Комплектующие | ||
| 1 | Движитель Chasing Dory правый (5) или левый (1) | 1 |
| 2 | Комплект крепежа для движителя: (винт М2\(\times\)12 + гайка М2) \(\times\) 3 | 1 |
| 3 | Кабель плоский шлейф 4 жилы | 10 м |
| 4 | Кабель Ethernet CAT 6A 32AWG (2,8 мм), 20м | 10 м |
| 5 | Разъем ответный для пульта управления | 1 |
| 6 | Изолента | 1 |
| Надводная часть | ||
| 1 | Джойстик (комплект с панелями) | 1 |
| 2 | Комплект крепежа (стойки М2\(\times\)8 н-в, М2\(\times\)8 в-в, 2 винта М2\(\times\)6) \(\times\) 6 | 1 |
| 3 | Литиевый аккумулятор 18650 | 2 |
| 4 | Переходник Ethernet-USB | По запросу |
| 5 | Зарядное устройство для аккумуляторов | Общее |
| Расходные материалы | ||
| Провода | Общее | |
| Фомакс | Общее | |
| АКП (алюкобонд) | Общее | |
| Свинец для балластировки | Общее | |
| Плавучесть | Общее | |
| Стержни для клеевого пистолета | Общее | |
Микро-ТНПА — герметичное устройство с одним движителем, способное перемещаться в толще воды и выполнять видеосъемку под водой, транслируя изображение с камеры на поверхность. Управление микро-ТНПА осуществляется с помощью пульта, связанного с подводной частью кабелем.
- Наименование выполняемых работ
Разработка микро-ТНПА для выполнения диагностики состояния морского судна. Требования к устройству:
Требования к микро-ТНПА:
- Поверхностная часть состоит из пульта управления с аккумуляторами и кабеля.
- Подводная часть устройства состоит из колбы с платой и камерой, движителя.
- Корпус устройства должен позволять ему свободно перемещаться в ограниченных пространствах (трубах) диаметром от 110 мм.
- Длина корпуса (без учета кабеля) не должна быть больше 20 см.
- Аппарат должен иметь возможность движения вперед и назад.
- Питание устройства осуществляется с джойстика (пульт управления микро-ТНПА) с помощью двух аккумуляторов 18650.
- Камера должна быть жестко зафиксирована внутри корпуса.
- Для движителя должно быть разработано его крепление к колбе.
- Запись и обработка видеопотока осуществляются с цифровой камеры микро-ТНПА. Вывод изображения должен осуществляться на ноутбук напрямую по кабелю Ethernet.
- Необходимо отбалластировать микро-ТНПА. Аппарат должен иметь плавучесть, близкую к нулевой.
- Управление микро-ТНПА должно осуществляться с пульта управления. Распиновка пульта представлена в Приложении 1.
- Связь между пультом и микро-ТНПА осуществляется с помощью интерфейса RS232.
- Светодиоды должны работать согласно регламенту: при нажатии на кнопку Вперед — светодиод горит зеленым, Назад — красным. Команда может задействовать либо 1, либо 2 светодиода на пульте управления для реализации этой функции.
Крепление мотора и камеры:
- Мотор должен быть прикреплен к задней крышке аппарата и/или к стягивающим шпилькам. Мотор присоединен к микро-ТНПА устойчиво.
- Вывод проводов осуществляется через заднюю крышку аппарата через герметичные разъемы.
- Камера жестко закреплена внутри корпуса. Отсутствует смещение камеры при движении аппарата.
- Все кабели выведены через герметичные разъемы.
- Для крепления движителя к корпусу запрещено использовать термоклей и изоленту в качестве единственного способа крепления. Эти материалы допускается применять в качестве вспомогательных.
- Со списком компонентов можно ознакомиться в разделе «Материалы для изготовления».
Способ транспортировки микро-ТНПА:
- Доставку микро-ТНПА к месту проведения работ осуществляет подводный аппарат MiddleROV.
- Микро-ТНПА можно переносить в манипуляторе аппарата.
- Команда получает дополнительные баллы, если разработает способ транспортировки микро-ТНПА не в манипуляторе MiddleROV.
- В качестве точки крепления на раме MiddleROV есть крепежный уголок, который может быть использован командами в качестве точки крепления микро-ТНПА для транспортировки.
Требования к ПО:
ПО для управления микро-ТНПА:
- Состоит из двух частей: прошивка для пульта и прошивка для платы микро-ТНПА.
- Связь между пультом и подводной частью осуществляется с помощью интерфейса RS232.
- При нажатии и удерживании кнопки Вверх — аппарат должен двигаться вперед, при нажатии и удерживании кнопки Вниз — назад.
- Распиновка пульта управления представлена в Приложении 1.
ПО для обработки видеопотока с камеры микро-ТНПА
ПО для обработки видеопотока должно решать следующие задачи:- Задача 1. Классификация обрастаний на стенке судна.
- Задача 2. Определение и подсчет повреждений в трубе.
Инструкция по работе с цифровой камерой представлена в справочном документе: https://disk.yandex.ru/i/eEi8mTgn5Wp9Qg.
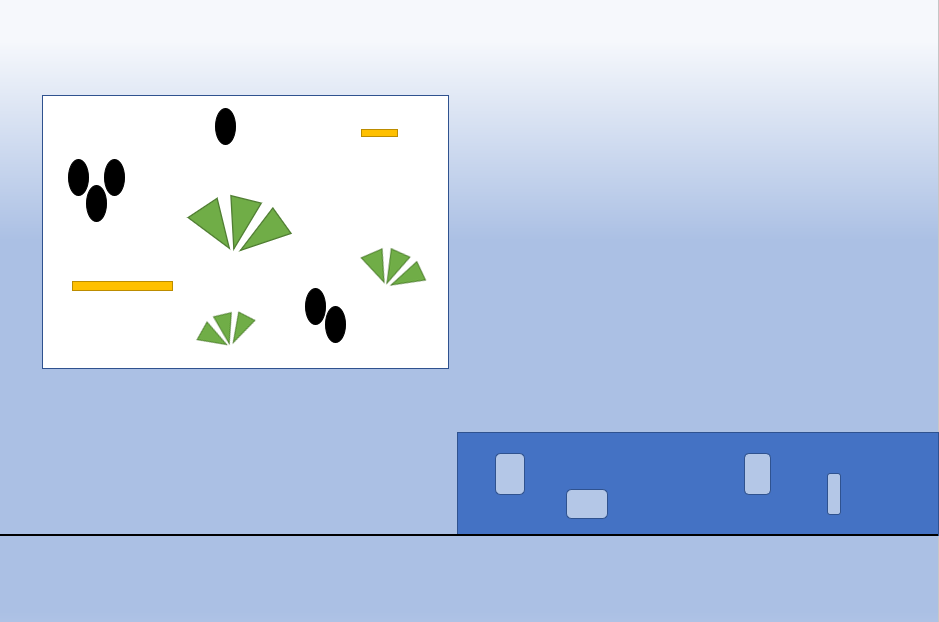 Рис. 5.1. Схема миссии
Рис. 5.1. Схема миссииЗадача 1.
Основными типами обрастаний, которые могут быть зафиксированы на корпусе судна, являются:
- Двустворчатые моллюски. Представляют собой группы черных овалов. Количество овалов может быть от одного до трех. Размеры моллюсков неизменны, может отличаться только их количество в группе. Команде нужно выделить группу моллюсков (но не каждый моллюск по отдельности!). В примере ниже приведены три группы моллюсков.
- Водоросли. Представляют собой группу из трех зеленых треугольников. Количество и положение треугольников в группе неизменно. Отличаться может только их размер (см. рис. ниже).
- Области коррозии. Прямоугольники оранжевого цвета. Ширина прямоугольников неизменна, может меняться только их длина.
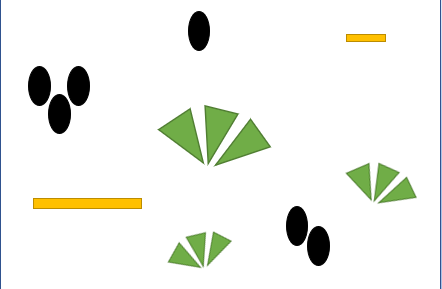 Рис. 5.2. Типы обрастаний на корпусе судна
Рис. 5.2. Типы обрастаний на корпусе суднаКлассификация обрастаний:
- При погружении в воду программист компьютерного зрения запускает программу на своем ноутбуке.
- На мониторе должно быть два окна: видеопоток, получаемый с аппарата, и обработанное видео (на обработанном видео происходит определение типа обрастаний и их подсчет).
- При движении в толще воды аппарат должен совершить остановку напротив таблички, обозначающей стенку морского судна. При этом на мониторе программиста компьютерного зрения должно быть видно изображение всей таблички. Необходимо выделить все найденные обрастания и подписать их тип.
- В левом верхнем углу необходимо указать, сколько обрастаний и какого типа было обнаружено.
- В тот момент, когда программист компьютерного зрения готов сдать задачу, он говорит: «Готов!» и нажимает на клавишу 1.
- После нажатия на клавишу 1 на мониторе создается новое окно с изображением, на котором видна табличка с выделенными объектами и с их определенным количеством. Табличка с наростами должна находиться полностью в кадре. В верхнем левом углу кадра должна быть таблица с указанием типов наростов и их количеством.
- Необходимо предусмотреть сохранение этого изображения.
- В рамках попытки команда может выполнить фиксацию результата классификации только один раз.
Пример
- Shellfish: 3.
- Algae: 3.
- Corrosion: 2.
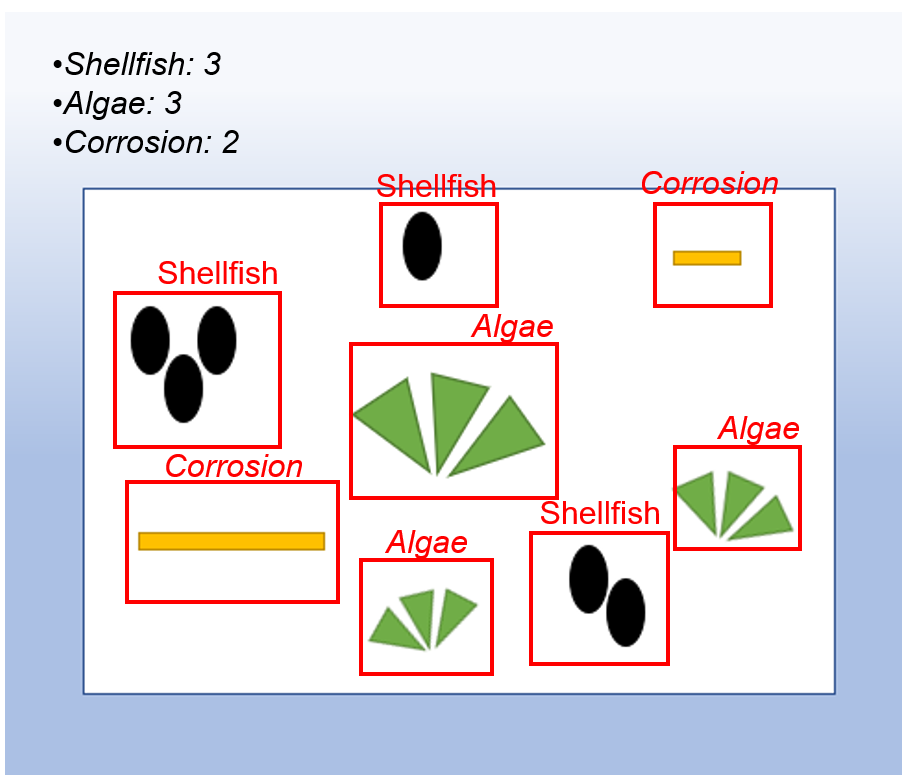 Рис. 5.3.
Рис. 5.3.Задача 2. Определение и подсчет повреждений на трубе:
- Необходимо заснять прохождения микро-ТНПА по трубе, моделирующей подводный шлюз и выполнить обработку видео в реальном времени.
- Необходимо в процессе движения микро-ТНПА по трубе, выделять контуры всех обнаруженных отверстий (повреждений) и вести их подсчет, отражая количество обнаруженных повреждений на видео.
- Примечание: отверстие в конце трубы тоже считается за повреждение.
Порядок выполнения задания:
- Пилот ТНПА доставляет микро-ТНПА до трубы и оповещает судью о готовности приступить к работе.
- После этого на мониторе должно быть два окна: видеопоток с аппарата (микро-ТНПА) и обработанное видео (на обработанном видео происходит выделение повреждений, а в верхнем углу должно выводиться количество этих повреждений). Подробнее в разделе Порядок проведения заплыва.
Состав работ
Таким образом, командой должны быть выполнены следующие работы:
- Разработка электроники микро-ТНПА, удовлетворяющего требованиям.
- Разработка конструкции микро-ТНПА, удовлетворяющей требованиям.
Создание комплекта конструкторской документации:
- Набор конструкторской документации (чертеж общего вида, чертежи трех конструкций: крепление камеры, крепление движителя, крепление микро-ТНПА к ТНПА MiddleROV).
- Принципиальная электрическая схема устройства.
- Разработка ПО для управления микро-ТНПА.
- Разработка ПО для проведения работ по классификации объектов.
Результат работы:
Собранный микро-ТНПА
Собранный микро-ТНПА, который функционирует согласно заявленным требованиям. ПО для обработки видеопотока с микро-ТНПА, которое позволяет производить диагностику состояния морского судна.
Принципиальная электрическая схема
Принципиальная электрическая схема микро-ТНПА (подводная часть). Принципиальная схема оформляется согласно критериям оценки. Название файла должно быть в формате
микроТНПА_название_кома нды.pdf(пример,микроТНПА_MUR.pdf).Комплект конструкторской документации
Должен состоять из чертежа общего вида микро-ТНПА, спецификации и чертежей разработанных конструкций: крепления камеры, крепления движителя, способа транспортировки ТНПА. Название файла должно быть в формате
корпус_название_команды.pdf(пример,корпус_MUR.pdf).Команда должна объединить чертежи и спецификацию в один файл и прислать только его. Если от команды будут получены два файла, то рассматриваться будет последний присланный.
Программа для управления микро-ТНПА
Всего должно быть загружено два файла: код для пульта (надводной части) и код для ТНПА (подводной части). Код для подводной и надводной части должны быть сложены в папки с названием
команда_bottomикоманда_surfaceи объединены в архив с названиемкоманда_microrov.zip(архивы других форматов или просто загруженный код рассматриваться не будут и команда получает 0 баллов и не допускается до заплывов).Например, для команды MUR решение будет выглядеть так: архив
MUR_microrov.zip, а в нем две папки:mur_bottomиmur_surfa ce.Программа для обработки изображения с камеры
Состоит из двух частей: задание 1 (определение обрастаний) и задание 2 (определение повреждений в трубе).
Коды для подводной и надводной части должны быть сложены в папки с названием
команда_task1икоманда_task2и объединены в архив с названиемкоманда_opencv.zip(архивы других форматов или просто загруженный код рассматриваться не будут и команда получает 0 баллов и не допускается до заплывов).Например, для команды MUR решение будет выглядеть так: архив
MUR_opencv.zip, а в нем две папки:mur_task1иmur_task2.
Сдача работы
Результаты работы проходят оценку в три этапа:
- Оценка документации (+ проверка на плагиат).
- Демонстрация работы на воздухе.
- Демонстрация работы в воде.
- Вся документация (чертежи, электрическая принципиальная схема) должна быть загружена в форму по ссылке до 20 февраля 2025 18:30.
- Программа для управления микро-ТНПА должна быть загружена в гугл-форму по ссылке. Дедлайн: 21 февраля 2025 10:00 (по местному времени).
- Программа для обработки изображения с камеры должна быть загружена в форму по ссылке. Дедлайн: 21 февраля 2025 10:00.
- Если документацию команда присылает после дедлайна, то такие работы не рассматриваются и оцениваются в 0 баллов.
- Итоговая демонстрация работы на воздухе проходит 20 февраля, согласно установленному расписанию. Команда может представить конструкцию для проверки на воздухе один раз досрочно до 19 февраля 18:30. Если команду не устроил результат, участники могут забрать конструкцию на доработку и повторно сдать ее в день итоговой демонстрации на воздухе.
- Оценка соответствия конструкции предоставленным чертежам проходит 21 февраля перед началом заплывов, после сдачи конструкций в карантин.
- Итоговая демонстрация работы микро-ТНПА в воде проводится 21 февраля.
- Подробнее о процессе сдачи работы в разделе Порядок проведения соревнований и оценивания.
Ниже представлена распиновка пульта управления, который идет в комплекте с набором для конструирования микро-ТНПА. Питание устройства осуществляется с помощью двух аккумуляторов 18650.
| Arduino Pin Name | Buoy Pin Function | MiddleBuoy Gamepad | |
|---|---|---|---|
| D7 | LED Strip PWM | + | |
| +5V | Power | ||
| RD- | USB | + | |
| RD+ | USB | + | *USB-Serial to PC |
| UGND | Ground | ||
| UCAP | USB Cap | ||
| VBus | USB VBUS | ||
| RXLED | RX LED | + | Serial Status LED |
| SCK | ICSP | + | |
| MOSI | ICSP | + | |
| MISO | ICSP | + | *Debug Port |
| D11 (PWM) | Input + PullUp | + | Button Down |
| RESET | ICSP | + | Debug Port |
| +5V | Power | ||
| GND | Ground | ||
| XTAL2 | OSC Output | ||
| XTAL1 | OSC Input | ||
| D3 (SCL)(PWM) | I2C SCL | + | |
| D2 (SDA) | I2C SDA | + | *OLED Display SSD1306 |
| D0 (RX) | UART RX | + | |
| D1 (TX) | UART TX | + | *RS232 — UART to Buoy |
| TXLED | TX LED | + | Serial Status LED |
| GND | Ground | ||
| AVCC | Analog Power | ||
| D4 | Input + PullUp | + | Button Up |
| D12 | Input + PullUp | + | |
| D6 (PWM) | LED Strip PWM | + | WS2812B |
| D8 | IO | ||
| D9 (PWM) | Servo PWM | + | |
| D10 (PWM) | Servo PWM / IO | ||
| D5 | Input + PullUp | + | |
| D13 (PWM) | PWM / Output | + | Status LED (Boot) |
| HWB | Boot Mode | См. схематик Arduino Leonardo | |
| +5V | Power | ||
| GND | Ground | ||
| A0 | Analog Input | + | |
| A1 | Analog Input | + | Voltmeter |
| A2 | Analog / IO | ||
| A3 | Analog / IO | ||
| A4 | Analog / IO | ||
| A5 | Analog / IO | ||
| AEF | Analog Ref | ||
| GND | Ground | ||
| AVCC | Analog Power |
- Критерии оценки приведены в разделе Критерии оценивания.
- Документация оценивается двумя судьями — в зачет идет среднее значение оценок судей.
- Демонстрация работы на воздухе проходит в конце тренировочного дня согласно расписанию.
- Команда имеет право пройти проверку на воздухе досрочно. В случае, если команда не согласна с результатами проверки, она может попытаться устранить недочеты в своей конструкции и пройти проверку заново согласно общему расписанию.
- Проверка соответствия изделия предоставленным чертежам проводится перед заплывами 21 февраля.
- Демонстрация работы в воде проходит в испытательном бассейне. У команды две попытки на демонстрацию работы. В зачет идет лучшая попытка.
- Все устройства и разработанный программный код проходят проверку на воздухе и проверку в воде.
- Команда может пройти проверку на воздухе раньше установленного срока согласно расписанию.
- В таком случае судья проводит проверку результата и оглашает итоговый балл за проверку. Если команду не устраивает оценка, то она может забрать свое устройство на доработку и пройти проверку согласно расписанию. В зачетную таблицу идут результаты последней проверки.
- Разработчики профиля подготавливают расписание тренировок. Порядок тренировок команд определяется жеребьевкой 19 февраля в конце дня. Тренировочный день — 20 февраля.
- Финальные заплывы проводятся 21 февраля.
- Перед началом каждой попытки устанавливается табличка с обрастаниями и труба, положение которых не меняется в течение всего заплыва для всех команд.
- Перед началом попыток все разработанные микро-ТНПА сдаются в карантин. Ноутбуки остаются на столах и работать за ними в период проведения заплывов запрещено.
- Изображения на таблице и количество повреждений в трубе на финальных заплывах отличаются от предоставленных макетов для тренировок в пределах, указанных в регламенте.
- Каждой команде предоставляется две попытки по 15 мин. В рамках одной попытки команда имеет право выполнить заплыв один раз.
- В рамках попытки предусмотрено три этапа: установка микро-ТНПА, демонстрация в воде (заплыв), извлечение микро-ТНПА из воды.
- Команде дается 15 мин на выполнение задания.
- Команда подходит на рабочую станцию со своим ноутбуком и микро-ТНПА согласно расписанию заплывов и извещает судью о готовности начать заплыв.
- Судья запускает таймер 15 мин.
За это время команда должна:
- Установить микро-ТНПА в захват подводного аппарата MiddleROV.
- Выполнить демонстрацию работы в бассейне.
- Извлечь микро-ТНПА из воды.
- При завершении попытки капитан команды говорит: «Стоп!», и судья останавливает таймер, фиксирует время и набранные баллы.
- Команда может завершит попытку и сказать «стоп» только тогда, когда микро-ТНПА будет извлечен из воды и доставлен на бортик бассейна.
- Извлечь микро-ТНПА команды могут вручную.
Алгоритм проверки определения типа обрастаний:
- При погружении в воду программист компьютерного зрения запускает программу на своем ноутбуке.
- На мониторе должно быть два окна: видеопоток, получаемый с аппарата и обработанное видео (на обработанном видео происходит определение типа обрастаний и их подсчет).
- В тот момент, когда программист компьютерного зрения готов сдать задачу, он говорит: «Готов!» и нажимает на клавишу 1.
- После нажатия на клавишу 1 на мониторе создается новое окно с изображением, на котором видна табличка с выделенными объектами и с их определенным количеством. Табличка с наростами должна находиться полностью в кадре. В верхнем левом углу кадра должна быть таблица с указанием типов наростов и их количеством (см. п. 3.2).
- Необходимо предусмотреть сохранение этого изображения.
- Судья оценивает результат работы по изображению в третьем окне, после чего аппарат переходит к выполнению следующей задачи.
Алгоритм проверки прохождения трубы:
- Пилот ТНПА доставляет микро-ТНПА до трубы и оповещает судью о готовности приступить к работе.
- После этого на мониторе должно быть два окна: видеопоток с аппарата (Микро-ТНПА) и обработанное видео (на обработанном видео происходит выделение повреждений, а в верхнем углу должно выводиться количество этих повреждений).
- Микро-ТНПА должен пройти через всю трубу, т. е. достичь второго конца трубы с заглушкой: судья видит на мониторе, что изображение на камере не меняется, и расстояние до отверстия в крышке остается неизменным, а при нажатии кнопки Вперед робот не смещается (движение отсутствует).
- После фиксации судьей прохождения трубы микро-ТНПА должен выплыть из нее своим ходом (запрещено тянуть кабель микро-ТНПА, с целью его вытащить).
- Судья фиксирует завершения обследования в момент выхода микро-ТНПА из трубы, и сразу после этого команда может извлечь устройство за кабель.
Завершение попытки
Команда может завершить попытку после громкой команды «стоп» только при выполнении следующих условий:
- ТНПА MiddleROV возвращен к точке старта и извлечен из воды на бортик бассейна.
- Микро-ТНПА извлечен из воды.
- Если команда выполнила условия завершения заплыва, а затем была дана команда «стоп», то судья останавливает таймер.
- После остановки таймера производится проверка конструкции на сохранение герметичности и целостности после заплыва.
- Если команда не уложилась в отведенное время выполнения задания, то фиксируются баллы, набранные на момент окончания времени миссии, также начисляется 5 штрафных баллов.
- Нарушение техники безопасности: первое нарушение — предупреждение, второе и последующие: \(-5\) баллов.
- Обфускация (запутывание кода)/плагиат — баллы за задачу обнуляются у всех команд, у которых он был обнаружен.
- Если члены команды тянут ТНПА (любой и за любой из трех кабелей), то за первое нарушение — предупреждение, за второе второе и последующие — вычитается 5 баллов.
- Если команда тянет за кабели микро-ТНПА с целью спозиционировать его или вытащить из трубы, то баллы за критерий следования и возврата микро-ТНПА по трубе команда получает 0 баллов и предупреждение. При повторном нарушении: \(-5\) баллов. Разрешено тянуть за кабель микро-ТНПА только с целью его извлечения из воды, когда он полностью вышел из трубы.
| № | Критерий | Балл | Пояснение |
|---|---|---|---|
| Документация | |||
| Принципиальная схема. Данная схема разрабатывается в соответствии с ГОСТ 2.702-2011. | |||
| 1 | Наличие заполненной рамки для заглавного листа в соответствии с ГОСТ 2.104-2006 | 1 | |
| 2 | Линии связи состоят из горизонтальных и вертикальных отрезков и не имеют изломов и взаимных пересечений | 1 | |
| 3 | Все надписи выполнены шрифтом ГОСТ тип Б | 1 | |
| 4 | Схема снабжена перечнем элементов с указанием их номиналов | 2 | |
| 5 | Обозначение компонентов соответствует УГО | 2 | |
| 6 | Схема соответствует условию задачи: 0 — не соответствует, 1 — частично соответствует, 2 — полностью соответствует | 2 | |
| Чертеж общего вида (разрабатывается в соответствии с ГОСТ 2.120-73) | |||
| 1 | Рамка и основная надпись на заглавной и последующих страницах соответствует ГОСТ | 1 | Количество листов не ограничено |
| 2 | Представлены изометрия и минимум 2 вида (разрез/вырыв считается за вид, а местный вид или вид с разрывом — нет) | 2 | Речь про чертеж всей конструкции микро-ТНПА. |
| 3 | Указаны габаритные размеры всей сборки и каждой разрабатываемой конструкции отдельно | 2 | Разрабатываемые конструкции: крепление камеры, крепление движителя, крепление микро-ТНПА к ТНПА |
| 4 | Чертеж дополнен спецификацией с рамкой по ГОСТ, разрабатываемые детали и готовые явно отделены, указано корректное количество и номера соответствуют указателям на чертеже | 2 | Детали из индивидуального набора считать прочими изделиями; для указания всех деталей рекомендуется применить взрыв-схему или использовать достаточное для указания всех деталей конструкции количество видов и различные их типы. |
| 5 | Качество исполнения чертежа: 0 — нечитаемо, не соответствует требованиям, 1 — есть вопросы по оформлению, частично соответствует, 2 — 1–2 незначительные ошибки, соответствует требованиям | 2 | |
| Код | |||
| 1 | Программа для микро-ТНПА загружена вовремя | 1 | |
| 2 | Программа для микро-ТНПА загружена вовремя | 1 | |
| Проверка на воздухе | |||
| Конструкция | |||
| 1 | Конструкция соответствует предоставленным чертежам | 1 | |
| 2 | В конструкции нет потенциальной опасности (острых выступов и деталей) | 2 | |
| 3 | Крепление движителя реализовано и соответствует требованиям | 2 | Мотор должен быть прикреплен к задней крышке аппарата; в креплении используется не только термоклей; изолента, применяется по необходимости |
| 4 | Камера надежно зафиксирована внутри корпуса | 2 | |
| 5 | Аппарат имеет плавучесть близкую к нулевой | 2 | |
| 6 | Конструкция аппарата позволяет переносить его не в манипуляторе ТНПА | 4 | |
| Электроника + МК | |||
| 1 | Электроника соответствует предоставленной схеме | 2 | |
| 2 | В исполнении схемы нет потенциальной опасности | 3 | |
| 3 | Включение устройства осуществляется с помощью пульта управления | 2 | |
| 4 | Светодиоды на пульте работают согласно регламенту | 2 | |
| 5 | Мотор работает (при нажатии кнопки Вверх — движение вперед, при нажатии кнопки Вниз — движение назад) | 3 | |
| 6 | Видеопоток с камеры выводится на монитор ноутбука | 2 | |
| Машинное зрение | |||
| 1 | Контуры объектов определяются | 1 | |
| 2 | Реализована функция подписи типа объектов | 1 | |
| 3 | Отверстия в трубе распознаются на воздухе | 1 | |
| Проверка в воде | |||
| 1 | Микро-ТНПА остался герметичен после проверки в воде (визуальное наличие воды в колбе) | 3 | Шаг считается успешно выполненным, если после завершения миссии судья фиксирует отсутствие влаги внутри корпуса микро-ТНПА |
| 2 | Конструкция микро-ТНПА надежна (после выполнения миссии все части микро-ТНПА остались на месте) | 3 | Шаг считается успешно выполненным, если после завершения миссии судья фиксирует отсутствие деталей от микро-ТНПА и креплений в бассейне и целостность конструкции |
| 3 | Микро-ТНПА выполнил исследование всей трубы: 10 баллов — выполнил полностью, 5 баллов — частично выполнено, 0 баллов — не выполнено | 10 | Шаг считается успешно выполненным если микро-ТНПА доплыл до конца трубы и на ноутбуке видно изображение бассейна через отверстие в конце трубы |
| 4 | Возврат микро-ТНПА | 5 | Шаг считается успешно выполненным, если микро-ТНПА достиг противоположной стороны трубы, а затем вернулся в стартовую точку; микро-ТНПА полностью вышел из трубы. |
| 5 | Получено изображение корпуса судна и трубы | 5 | Шаг считается выполненным, если видеопоток с аппарата транслируется на мониторе и в кадр попало изображение судна и труба |
| 6 | Правильно выделены все типы обрастаний: 10 баллов — 8 наростов выделены верно, 8 баллов — от 5 до 7 наростов выделены верно, 4 балла — от 2 до 4 наростов выделены верно, 0 баллов — от 0 до 1 нароста выделены верно | 10 | Шаг считается выполненным, если каждый нарост выделен в отдельную рамку и рамка подписана соответствующим названием |
| 7 | Посчитано количество обрастаний разного типа на корпусе судна | 4 | Шаг считается выполненным, если на изображении с выделенными наростами сверху есть таблица с указанием количества наростов разного типа и их количество указано корректно |
| 8 | Определены контуры и подсчитано количество повреждений: 2 балла — определено 1 повреждение, 4 балла — выделено 2–3 повреждения, 6 баллов — выделено 4 повреждения, 8 баллов — выделено 5 и более повреждений, 10 баллов — выделены все повреждения и их количество | 10 | Шаг считается выполненным, если при движении микро-ТНПА по трубе на видеопотоке выделяются отверстия и ведется их подсчет |
| ИТОГО | 100 | ||
- В итоговый зачет идут баллы, набранные командой за лучшую попытку в воде из двух.
- Результатом оценки документации является среднее значение оценок судей.
- Результатом оценки на воздухе является балл набранный при последней проверке.
- После завершения оценок формируется единый рейтинг. Команда-победитель определяется по сумме баллов за все испытания. Если две команды набрали одинаковое количество баллов, то в расчет берется результат худшей попытки.
- Индивидуальный результат определяется по формуле: Итоговый балл = \(20\%\) физика + \(20\%\) информатика + \(60\%\) инженерный тур.
Разработка электроники микро-ТНПА. Для выполнения задачи участникам необходимо собрать схему подводной части аппарата на основе Arduino Nano, а также наладить связь между пультом и микро-ТНПА с использованием интерфейса RS232. На плате пульта микросхема для реализации связи уже установлена, поэтому участникам нужно было использовать микросхему MAX3232.
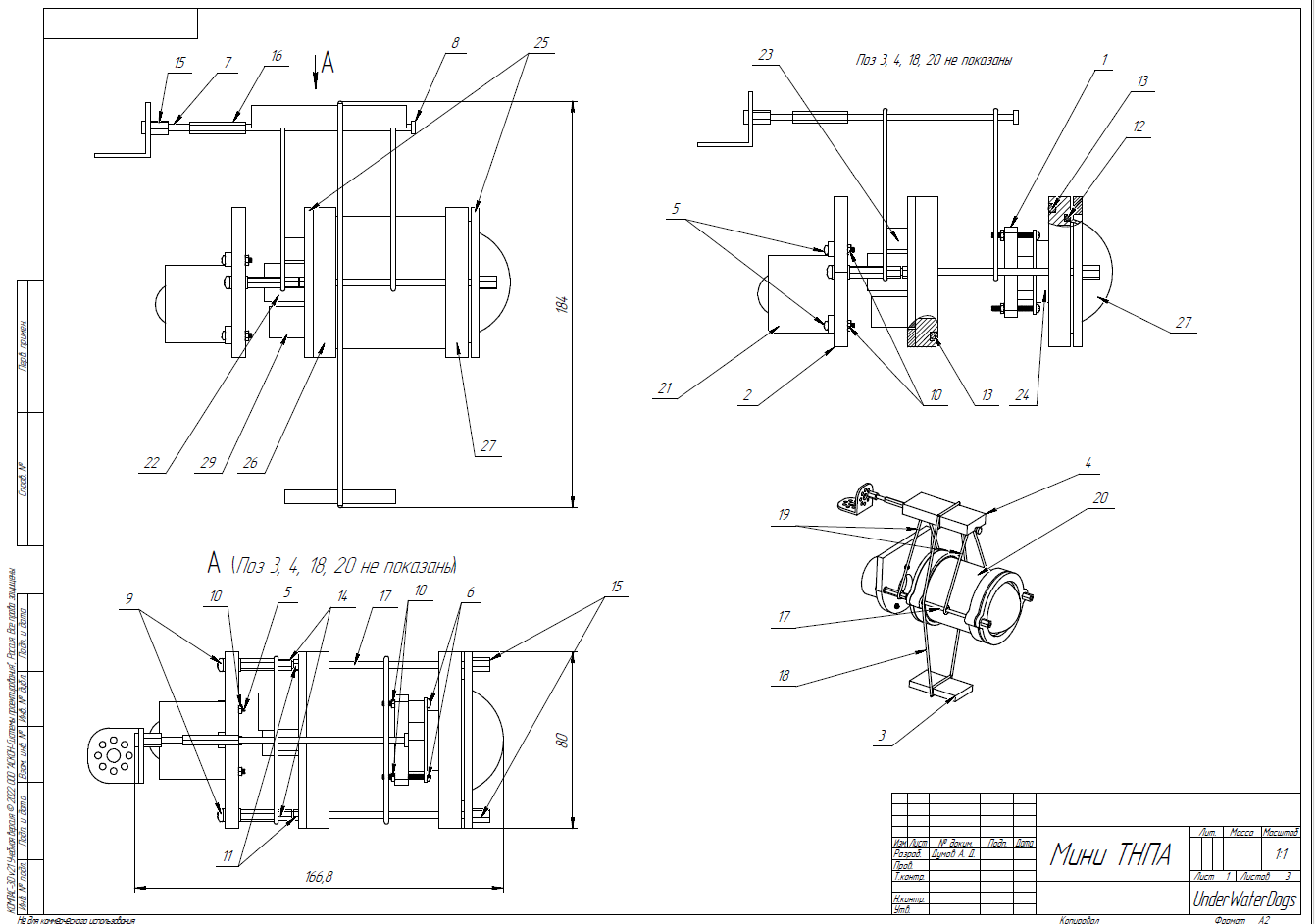
Примеры реализации микро-ТНПА см. рис. 7.1–7.3.



Для разработанного микро-ТНПА необходимо было составить принципиальную электрическую схему: рис. 7.4.
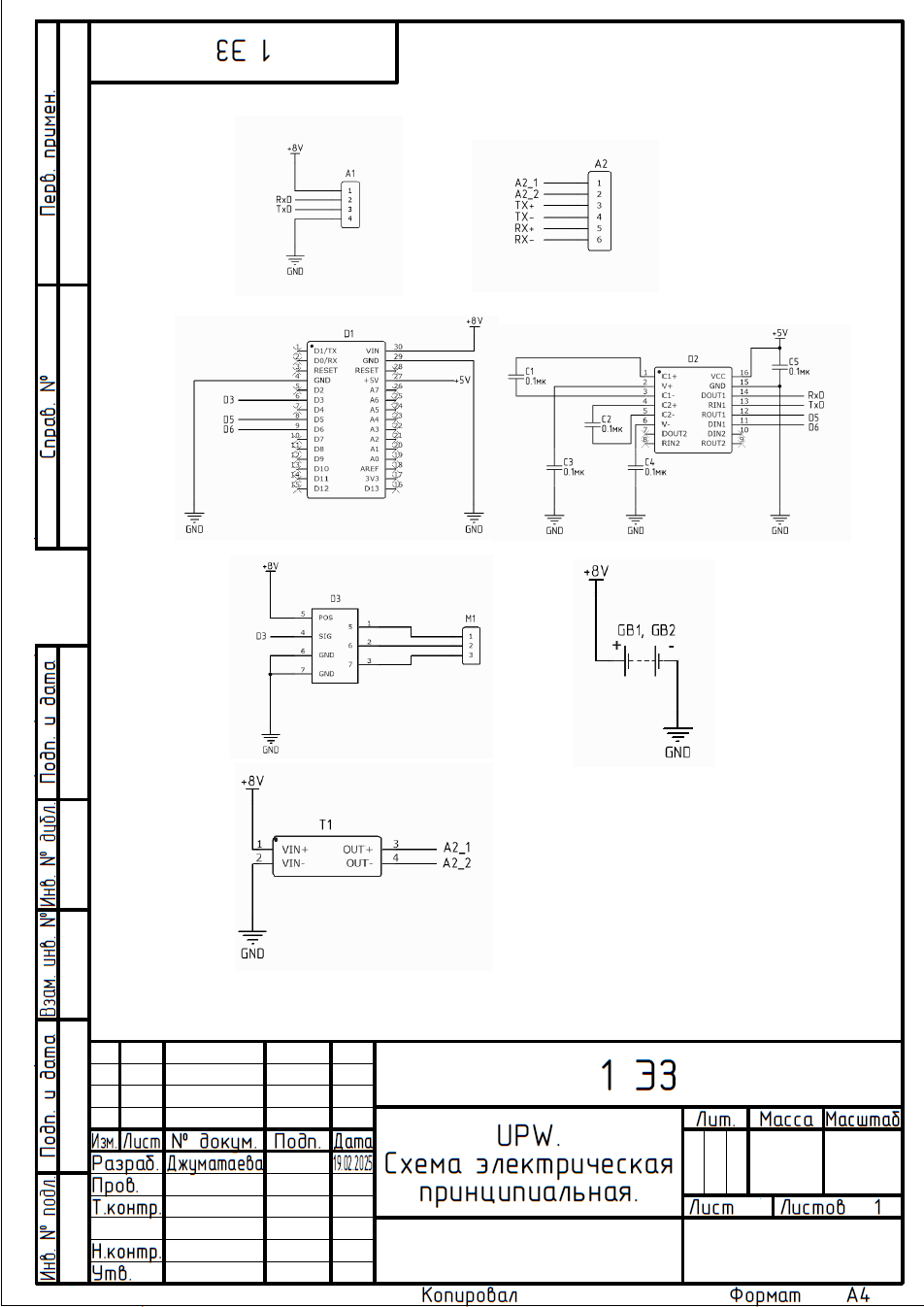
Примеры принципиальных схем: https://disk.yandex.ru/d/0WoMzE3yBu8SKA.
Результатом работы является набор конструкторской документации (чертеж общего вида, чертежи трех конструкций: крепление камеры, крепление движителя, крепление микро-ТНПА к ТНПА MiddleROV). Микро-ТНПА и способ транспортировки проходят тестирование на воздухе и в воде. В качестве точки крепления микро-ТНПА к ТНПА мог быть использован уголок, установленный в нижней части аппарата или отверстия M5 в нижней пластине рамы ТНПА.
Примеры выполнения конструкторской документации: рис. 7.5.
Пример комплекта конструкторской документации: https://disk.yandex.ru/d/Wc1zhQ1GMPSajA.
Для успешного решения поставленной задачи программисту микроконтроллеров необходимо написать код для надводной (пульт) и подводной (микро-ТНПА) частей аппарата. При работе микро-ТНПА должна выполняться следующая последовательность действий:
- При нажатии на кнопку Вперед светодиод должен светиться зеленым цветом, при нажатии на кнопку Назад — красным.
Для управления движителем, необходимо подать на управляющий контакт ШИМ (PWM) сигнал со следующими характеристиками:
- Частота 50 Гц.
Ширина импульса от 1000 до 2000 мкс:
- Сигналу 1000 мкс соответствует полный назад (тяга \(-100\%\)).
- Сигналу 1500 мкс соответствует стоп (тяга \(0\%\)).
- Сигналу 2000 мкс соответствует полный вперед (тяга \(+100\%\)).
Указанные диапазоны могут варьироваться для каждого мотора (к примеру, нейтральному положению может соответствовать сигнал 1485 мкс, а не 1500 мкс). Участникам может понадобиться самостоятельно подобрать значение, соответствующее нулевой тяге. Для успешной инициализации при запуске на мотор следует подавать сигнал с нулевой тягой в течение нескольких секунд.
Ссылка на архив с кодом с комментариями от разработчиков: https://disk.yandex.ru/d/Vs3sGsaS7rFfbQ/nto-camera.zip.
Для успешного решения поставленной задачи программисту компьютерного зрения необходимо обработать видео с цифровой камеры следующим образом:
- Распознать значение глубины на глубиномере и вывести его.
- Распознать фигуры на табличке и выделить их.
- Определить класс фигур на табличке и подписать каждую.
- Посчитать количество объектов каждого класса и вывести результат на экран.
- По нажатию на кнопку 1 вывести статичную картинку с результатом.
Для подзадачи 2 необходимо:
- Распознать круглые отверстия в трубе.
- Исключить возможность распознавания отражений в трубе в качестве отверстия
- Настроить вывод количества обнаруженных отверстий в обработанном видеопотоке.
Примеры реализации кода от участников финала («Кокосы» — 50 за миссию, ROZEN — 50 за миссию): https://disk.yandex.ru/d/WS6DpLc2bgrJew, https://disk.yandex.ru/d/GtUw104hhU13hg.
- MUR IDE: https://murproject.com/#muride.
- Arduino IDE: https://www.arduino.cc/en/software.
- Практикум профиля Водные робототехнические системы: https://disk.yandex.ru/i/NAhopKofwZNhwQ.
- Видео по подводной робототехнике: https://vk.com/murproject.





