
Инженерный тур. 3 этап
На заключительном этапе профиля АТС необходимо запустить и отладить автономную транспортную систему, состоящую из трех программируемых устройств:
- беспилотного автомобиля;
- квадрокоптера;
- сервисного центра.
Участники разрабатывают и отлаживают программы, управляющие беспилотными устройствами. Они не только создают систему для транспортировки грузов, но и интегрируют ее в информационную инфраструктуру города. Беспилотники собирают информацию, необходимую для доставки грузов, и другие полезные данные.
В этом году система должна обнаружить дефектные участки дорожного полотна и определить степень их поврежденности.
Администрация города НТО устраивает конкурс на разработку полностью автономной транспортной системы с функцией анализа состояния дорожного покрытия.
Для создания и отладки прототипов систем выделяется полигон с обширной сетью дорог и программируемые наземные и воздушные беспилотные аппараты. Беспилотники могут собирать три типа данных, определяющих состояние дорожного полотна:
- наличие и характер внешних повреждений;
- уровень вибраций при преодолении участка дороги;
- пробы материала дорожного полотна.
На основе сведений, полученных от беспилотников, после анализа проб система должна определить, какие участки городских дорог нуждаются в ремонте в первую очередь.
В конкурсе участвуют несколько команд разработчиков. Победителем станет та команда, которая к концу конкурса продемонстрирует наиболее совершенный прототип слаженно работающей транспортной системы. Качество ее работы определяется точностью предсказаний и количеством объектов городской среды, с которыми беспилотники корректно взаимодействуют.
Количество участников в команде 3–4 человека, среди которых:
- Программист беспилотного автомобиля: базовые знания в электронике; работа с алгоритмами локального позиционирования беспилотных автомобилей; написание алгоритмов обнаружения и взаимодействия с объектами воссозданной городской среды.
- Программист квадрокоптера: знание ROS; работа с компьютерным зрением и нейронными сетями в задачах квадрокоптеров, осуществляющих навигацию над полигоном воссозданной городской среды, детектирование наземных объектов.
- Программист лаборатории визуального анализа: определение трехмерных координат объектов по изображению с камеры; работа с алгоритмами детектирования и классификации цветовых маркировок; программирование промышленного манипулятора.
- Капитан команды: распределение задач среди участников команды, отслеживание дедлайнов, реализация обмена данными между устройствами транспортной системы; определение степени сложности финального испытания.
| Наименование | Описание |
|---|---|
| Полигон «АЙКАР Стенд», версия «Город НТО» и макеты зданий для полигона «Город НТО» | Интерактивный полигон городской среды со зданиями, дорожной разметкой и объектами городской среды: пешеходами, дорожными знаками, светофорами. Моделирует город, в котором необходимо разработать и запустить автономную транспортную систему. Доступ к полигону участники получают по расписанию. На полигоне участники отлаживают всю транспортную систему в целом, решают подзадачи беспилотного автомобиля и квадрокоптера. |
| УМК АЙКАР | Программируемая учебная модель беспилотного автомобиля АЙКАР, испытательный полигон «АЙКАР Стенд», версия «Восьмерка» и объекты городской среды: пешеходы, дорожные знаки. Доступен участникам в течение всего заключительного этапа. Используется для запуска и отладки программ локального позиционирования беспилотного автомобиля. |
| Квадрокоптер «Пионер» модификации НТО | Доступен участникам в течение всего заключительного этапа. Используется для запуска и отладки программ квадрокоптера. |
| Лаборатория визуального анализа (ЛВА) | Устанавливается на полигоне «Город НТО». Моделирует здание с системой хранения проб дорожного полотна. Оснащена промышленным манипулятором, которым участники управляют программно. Манипулятор захватывает пробы и располагает их перед объективом камеры. Алгоритм обработки изображений с камеры и его синхронизацию с действиями манипулятора реализуют финалисты. Доступ к ЛВА участники получают по расписанию. |
| Объекты моделирующие повреждения дорожного покрытия | Изображения повреждений дорожного полотна. Устанавливаются на полигонах. Доступны участникам в течение всего заключительного этапа. |
| Стационарный компьютер для обучения нейронных сетей | Доступен участникам в течение всего заключительного этапа. Используется для обучения нейронных сетей и отладки программ, использующих их. |
| Ноутбук для инференса нейронных сетей | Доступен участникам в течение всего заключительного этапа. Используется для взаимодействия с программируемыми устройствами на полигоне и отладки алгоритмов компьютерного зрения и инференса нейросетей. |
| Ноутбук для редактирования программного кода | Доступен участникам в течение всего заключительного этапа. Используется для чтения документации, коммуникации с организаторами, поиска данных в интернете и редактирования программного кода. |
| Наименование | Описание |
|---|---|
| Tengine | Механизм для конвертации моделей нейросетей и их высокопроизводительного инференса во встраиваемых устройствах. Используется при квантовании нейросетевого детектора и запуске квантованного нейросетевого детектора на бортовом компьютере беспилотного автомобиля. |
| Python3 | Основной язык для написания алгоритмов компьютерного зрения и работы с нейросетями. Используется для написания программ всех устройств транспортной системы. |
| OpenCV (библиотека для python3) | OpenCV — библиотека алгоритмов компьютерного зрения, обработки изображений, численных алгоритмов и инференса нейросетей с открытым кодом. Используется для написания программ всех устройств транспортной системы. |
| Darknet (фреймворк) | Darknet — фреймворк для обучения нейросетевых детекторов с открытым исходным кодом, написанный на языке C с использованием программно-аппаратной архитектуры параллельных вычислений CUDA. Используется для обучения нейросетевых детекторов. |
| ROS (операционная система) | ROS — экосистема для программирования роботов, предоставляющая функциональность для распределенной работы. Используется при написании и запуске программ для квадрокоптера. |
| LabelImg | Приложение для разметки датасетов. |
| PuTTY | Клиент для различных протоколов удаленного доступа. Используется для подключения к устройствам транспортной системы по SSH. |
Правила проведения заключительного этапа: https://disk.yandex.ru/i/06BGpIFsc2I4Rw.
Участникам необходимо разработать и отладить автоматизированную транспортную систему с функцией анализа состояния дорожного, состоящую из трех устройств:
- беспилотного автомобиля;
- квадрокоптера;
- автоматизированной лаборатории, анализирующей пробы дорожного полотна.
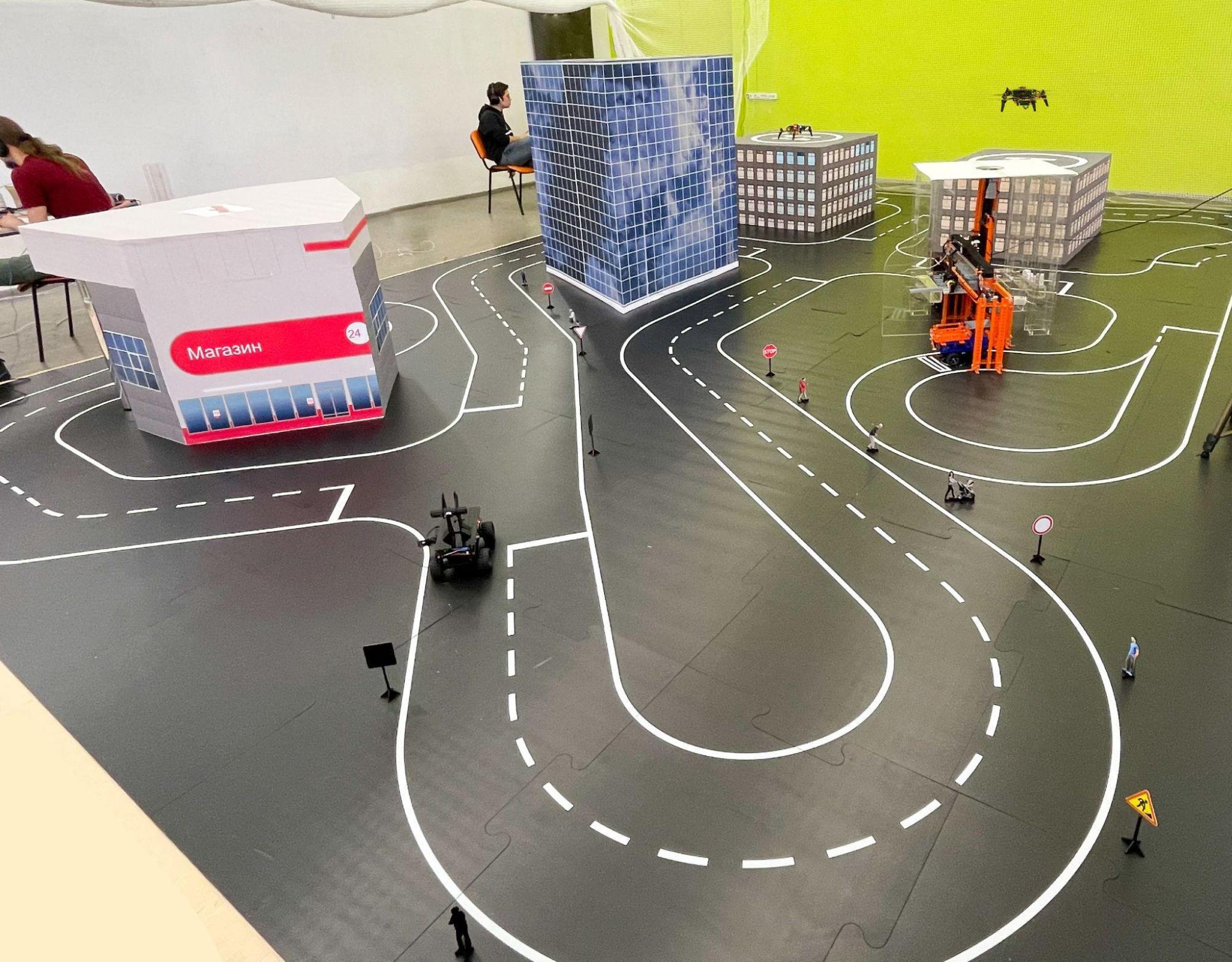
Все перечисленные устройства работают на полигоне, воссоздающем городскую среду, с макетами зданий, дорогами, перекрестками, дорожными знаками, пешеходами, светофорами и объектами, моделирующими разрушающиеся участки дороги (рис. 5.1).
Участки дороги разрушаются при каждом новом проезде наземного беспилотника, соответственно, изменяется их внешний вид, данные от акселерометров беспилотного автомобиля и результаты анализа проб дорожного покрытия.
Задача участников — вывести зависимость между количеством и видом внешних повреждений дороги, ее внутренней структурой, данными от акселерометров и количеством проездов, которые участок дороги сможет выдержать в будущем. Для этого необходимо собрать статистические данные от беспилотников и лаборатории.
На заключительном этапе беспилотники выступают средством для сбора и анализа информации. Каждый из трех типов полученных от них сведений позволяет улучшить точность предсказания необходимости ремонта участков дороги. Причем все данные должны анализироваться автоматически без участия человека.
Для каждого устройства необходимо написать разработать несколько алгоритмов.
Квадрокоптер:
- Взлет, патрулирование города, посадка.
- Поиск на изображении с камеры разрушающихся участков дороги и визуальный анализ их повреждений.
- Передача координат и данных о визуальных повреждениях беспилотным автомобилям.
Беспилотный автомобиль:
- Перемещение по дорожной сети города с соблюдением ПДД из пункта А в пункт Б.
- Получение данных о поврежденных участках дороги, требующих изучения.
- Сбор и анализ данных с акселерометров, установленных на колесной паре автомобиля.
- Построение маршрута в городе с учетом разрушенных участков дороги.
- Обмен данными с лабораторией визуального анализа при отгрузке проб дорожного полотна.
- Обнаружение на изображении с камеры различных объектов городской среды.
Лаборатория визуального анализа (ЛВА):
- Обмен данными с беспилотным автомобилем при отгрузке проб дорожного полотна.
- Захват проб дорожного полотна и их транспортировка к визуальному анализатору.
- Алгоритм визуального анализа структуры проб дорожного полотна.
Задача разработки транспортной системы разбита на несколько подзадач. Сдавать подзадачи и получать за них баллы участники могут до 10:00 (МСК) 7 марта.
Во время финальных испытаний участники демонстрируют слаженную работу нескольких устройств транспортной системы.
Материалы, предоставленные участникам на старте заключительного этапа, находятся в архиве: https://disk.yandex.ru/d/IaRr08YUFMhdDQ/Material/.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Необходимо изучить инструкцию по работе с моделью беспилотного автомобиля АЙКАР, соединить электронные модули согласно схеме подключения и продемонстрировать работу базового программного кода.
Для выполнения подзадачи необходимо:
- показать разработчику профиля скоммутированные электронные модули и получить разрешение на включение питания модели беспилотного автомобиля;
- запустить на модели беспилотного автомобиля АЙКАР базовый программный код и продемонстрировать его работу разработчику профиля.
1 балл — базовый код работает (беспилотник движется по разметке).
Комментарии
Выполнив это подзадание, участники убеждаются в исправности оборудования и работоспособности базового программного кода, а также осваивают умения, необходимые для дальнейшей работы с беспилотным автомобилем, а именно:
- установка аккумуляторов;
- включение питания систем беспилотника;
- передача файлов на бортовой компьютер;
- управление операционной системой бортового компьютера;
- запуск программ на бортовом компьютере.
Это задание является обязательным для выполнения всеми участниками. Его выполнение гарантирует, что они располагают исправным оборудованием и минимальными необходимыми навыками для работы.
Типовые ошибки при выполнении подзадания:
- невнимательное чтение инструкции;
- включение питания без разрешения разработчика профиля.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения задачи нужно:
- Безошибочно подключить соединительные провода к электронным модулям беспилотного автомобиля.
- Подключиться к бортовому компьютеру беспилотного автомобиля через SSH.
- Скопировать файлы базового программного кода на бортовой компьютер и запустить их для исполнения.
Эти действия выполняются по предоставленным инструкциям.
Порядок действий:
- АЙКАР устанавливается на расстоянии 2 м перед зоной приема проб дорожного полотна ЛВА, которая отмечена зеленым прямоугольником.
- В 50 см от беспилотника (за пределами проезжей части) устанавливается знак «Движение запрещено».
- По команде организатора участники запускают программу.
- Беспилотный автомобиль начинает движение в тот момент, когда организатор убирает знак из зоны видимости камеры.
- Автомобиль должен остановиться в зоне приема проб ЛВА (зона приема проб ЛВА обозначены зеленым прямоугольником, расположенным между ограничивающими дорожную полосу линиями разметки).
Подзадача считается выполненной, если:
- беспилотный автомобиль начал движение при исчезновении знака из поля зрения камеры;
- после полной остановки беспилотника зеленый прямоугольник находится между передней и задней колесными осями;
- подряд проведены два успешных испытания.
- 3 балла — беспилотник начал движение, как только знак «Движение запрещено» исчез из его зоны видимости.
- 2 балл — беспилотник остановился в зоне приема проб ЛВА.
Типовые ошибки при выполнении подзадачи:
- недостаточно точно подобранные пороги бинаризации для обнаружения запрещающего знака;
- реагирование на все зеленые прямоугольники, обнаруживаемые на идущих друг за другом кадрах.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения поставленной задачи следует разобраться в базовом коде и добавить в него два алгоритма: алгоритм обнаружения запрещающего движение знака и алгоритм поиска зоны приема проб ЛВА.
Для поиска дорожного знака на изображении можно применять различные способы:
- обучение нейросети;
- использование каскада Хаара;
- поиск объекта по цвету.
Самый простой вариант решения — последний, однако этот метод требует четко подобранных порогов бинаризации.
В решении, представленном ниже, перед основным циклом обработки кадров расположен дополнительный цикл, который выполняется, пока запрещающий знак не исчезнет из кадра. Внутри цикла проводится бинаризация и поиск контуров. Для каждого найденного контура вычисляется минимальная окружность, которая его охватывает.
Если площадь контура составляет более 80% от площади этой окружности, считается, что знак найден.
Если круг не найден в течение 2 с, то цикл завершается и начинается основной цикл обработки кадров.
while True:
_, frame = cap.read()
height, width, _ = frame.shape
new_width = int(width * 0.3)
cropped_frame = frame[50:250, new_width : width - new_width]
hsl_frame = cv2.cvtColor(cropped_frame, cv2.COLOR_BGR2HLS)
binary = cv2.inRange(hsl_frame, (132, 86, 102), (179, 255, 255))
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
circle_found = False
for contour in contours:
(x, y), radius = cv2.minEnclosingCircle(contour)
center = (int(x), int(y))
radius = int(radius)
try:
if cv2.contourArea(contour) / (np.pi * radius * radius) > 0.8:
cv2.circle(cropped_frame, center, radius, (0, 255, 0), 2)
circle_found = True
circle_last_seen = time.monotonic()
print("Circle found")
break
except Exception as e:
print(e)
if not circle_found:
print("Circle not found")
if not circle_found and
(time.monotonic() - circle_last_seen) > 2:
print("Circle not found for 2 seconds, exiting...")
breakВторая часть задания связана с остановкой в зоне приема проб ЛВА. Задача сводится к детектированию зеленого прямоугольника и отсчету времени для остановки беспилотника в нужный момент. В решении, представленном ниже, проводится бинаризация так, чтобы зеленые пиксели стали белыми, а все остальные – черными.
Подсчитывается число белых пикселей: если оно больше определенного значения, то линия считается обнаруженной (это должно произойти два раза подряд). Если линия обнаружена, то засекается время и через 0,514 с беспилотник останавливается.
Следующий фрагмент кода располагается в основном цикле обработки кадров.mark_frame = frame[150:200, 216:316]
hsv_frame = cv2.cvtColor(mark_frame, cv2.COLOR_BGR2HSV_FULL)
bin_frame = cv2.inRange(hsv_frame, (0, 76, 0), (179, 255, 255))
green = np.count_nonzero(bin_frame)
# print(f"Current green: {green}")
if green > 600 and not green_flag:
# print("Found green > 2000")
green_flag = True
if green_flag and green < 600 and SUPER_FLAG == False:
print("Green end")
LAST_TIME_DETECTED = time.monotonic()
SUPER_FLAG = True
if SUPER_FLAG == True and time.monotonic() > LAST_TIME_DETECTED + 0.514:
STATE = STOP
print("STOP")
arduino.stop()Акселерометры установлены на колесной паре автомобиля и непрерывно фиксируют изменения в ускорении автомобиля. Чтобы получить данные от них, необходимо в момент нахождения беспилотника на поврежденном участке отправить сообщение: get_sample. Данные представляют собой 200 чисел от 0 до 100, разделенных пробелом. Это значения вертикального ускорения в условных единицах, измеренные через равные промежутки времени.
Порядок действий:
- АЙКАР устанавливается на расстоянии 1–2 м от поврежденного участка дороги.
- По команде организатора участники запускают программу.
- Беспилотный автомобиль должен проехать по поврежденному участку дороги и вывести данные от акселерометров в терминал SSH-соединения с бортовым компьютером автомобиля.
Подзадача считается выполненной, если:
- беспилотный автомобиль отправил сообщение акселерометру в момент движения через поврежденный участок дороги;
- в терминал SSH соединения с автомобилем вывелись данные от акселерометров;
- разработчик просмотрел код запущенных программ и признал его рабочим.
4 балла — получены данные от акселерометров на колесной паре беспилотного автомобиля.
Комментарии
В IP-сети беспилотных аппаратов был развернут MQTT-сервер, моделирующий акселерометры. Для получения данных от акселерометра следовало отправить запроса MQTT-серверу и получить ответное сообщение.
Типовые ошибки при выполнении подзадачи:
- множественное детектирование одного и того же поврежденного участка;
- неверно определенные и указанные в коде IP-адреса устройств;
- отсутствие декодирования сообщения от сервера при его получении;
- непрерывная серия запросов к серверу вместо одного запроса.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
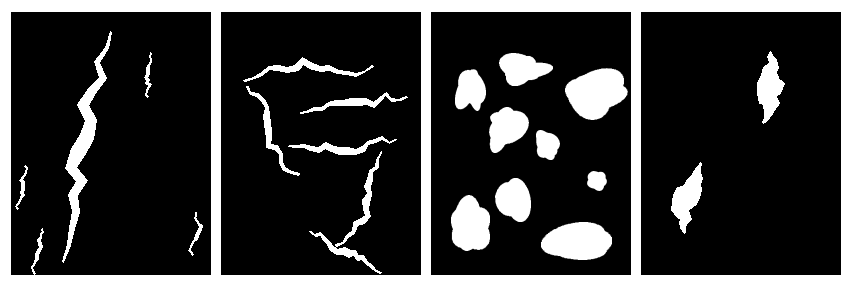
Такие изображения накладываются на полигон для беспилотных автомобилей между линиями дорожной разметки. Базовый алгоритм движения по разметке не отличает друг от друга белые повреждения и линии дорожной разметки, из-за чего беспилотный автомобиль съезжает с трассы на поврежденных участках. Поэтому часть задачи — модернизация алгоритма движения по разметке.
В базовый алгоритм детектирования разметки можно добавить функцию, которая будет удалять белые повреждения с изображения участка дороги перед колесами автомобиля.
def fill_points(bin_frame):
contours, _ = cv2.findContours(bin_frame,
cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
new_mask = np.zeros_like(bin_frame)
if contours:
min_x = min(cv2.boundingRect(cnt)[0] for cnt in contours)
max_x = max(cv2.boundingRect(cnt)[0] +
cv2.boundingRect(cnt)[2] for cnt in contours)
tolerance = 50
left_contours = [cnt for cnt in contours if
cv2.boundingRect(cnt)[0] <= min_x + tolerance]
right_contours = [cnt for cnt in contours if
cv2.boundingRect(cnt)[0] +
cv2.boundingRect(cnt)[2] >= max_x - tolerance]
cv2.drawContours(new_mask, left_contours, -1, 255,
thickness=cv2.FILLED)
cv2.drawContours(new_mask, right_contours, -1, 255,
thickness=cv2.FILLED)
return new_maskФункция получает на вход бинаризованное изображение участка дороги, на котором производится поиск всех контуров, определяются координаты самого правого и левого контура. Контуры в интервале \(tolerance = 50\) от самого левого и правого переносятся на новое черно-белое изображение, идентичное по размерам исходному. Таким образом все контуры повреждений между линиями дорожной разметки исчезают. Полученное изображение можно передавать в базовый алгоритм движения по разметке.
Вторая часть задачи — обнаружение поврежденных участков дороги. Надежнее всего использовать для этой цели нейросетевой детектор. Необходимо собрать и разметить датасет со всеми видами поврежденных участков дорожного полотна — сфотографировать объекты с разнообразных ракурсов, под которыми беспилотный автомобиль может их увидеть.
Если предполагается обнаружение объектов на одной конкретной дистанции, то в датасет нужно добавлять только фотографии с объектами на этом конкретном удалении от камеры; в настройках обучения детектора нужно отключить масштабирование при аугментации данных.
На полученном датасете необходимо обучить детектор Yolo v4-tiny и выполнить квантование модели для запуска на бортовом компьютере беспилотного автомобиля. Ниже приведен код, использующий детектор для обнаружения поврежденных участков дорожного полотна. Для избежания множественных срабатываний детектора вводится задержка 2 с.
Перед циклом чтения кадров выполняются инструкции, загружающие модель нейронной сети из файла и настраивающие ее якорные рамки.model = yolopy.Model('best.tmfile', use_uint8=True,
use_timvx=True, cls_num=1)
model.set_anchors([18, 33, 33, 48, 25, 71, 58, 76,
40, 113, 87, 140])Следующая функция возвращает True, если в кадре появляется поврежденный участок дороги.
def detect_yolo(frame):
frame = apply_perspective(frame, [(511, 392),
(725, 391), (406, 713), (841, 715)])
classes, scores, boxes = model.detect(frame)
return len(classes) > 0В цикле обработки кадров добавлена проверка наличия поврежденных участков дороги. Если подобные участки есть и в течение последних 2 с подобных участков в кадре не было, то отправляется запрос MQTT-серверу, ответ от которого выводится в терминал.
if detect_yolo(frame):
if time.time() - last_detect > 2:
client.send()
response = client.get_output()
print(response)
last_detect = time.time()Под картой подразумевается набор данных, позволяющий построить изображение полигона с отмеченными поврежденными участками дорог. У каждого участка необходимо:
- обозначить тип повреждений;
- указать порядковый номер;
- отметить число посещений беспилотным автомобилем.
Поврежденные участки должны быть обозначены так, чтобы было ясно, на какой стороне дороги повреждение, и, с точностью до одного пунктирного штриха разметки, понятно его положение.
По команде организатора участники запускают три программы:
- имитатор-квадрокоптер, отправляющий карту;
- программу, принимающую данные от квадрокоптера на борту беспилотного автомобиля;
- программу, визуализирующую карту на компьютере оператора.
Подзадача считается полностью выполненной, если:
- на компьютере оператора отобразилась карта поврежденных участков;
- в терминал SSH-соединения с автомобилем выведены данные, пересылаемые беспилотником, и участник объяснил методику их интерпретации для получения карты;
- разработчик просмотрел код запущенных программ и признал его рабочим.
5 баллов — получена карта расположения поврежденных участков дорожного полотна от квадрокоптера.
Комментарии
Стартовое положение поврежденных участков на карте участники задавали самостоятельно.
Типовые ошибки при выполнении подзадачи:
- попытки передавать не метаданные, а изображение карты;
- неверно определенные и указанные в коде IP-адреса устройств;
- отсутствие отображения типа повреждения, порядкового номера точки или числа посещений беспилотником.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Задачу можно разбить на две части: создание программы для пересылки метаданных о поврежденных участках дороги, а также программы для построения карты по метаданным и ее отображения.
Ниже представлен код программы сервера, принимающего и хранящего данные о поврежденных участках дороги. Серверу передаются новые данные, после чего информация о поврежденных участках обновится.
У сервера можно запросить те данные, которые он сейчас хранит. Программа сервера использует FastAPI. Определен класс для хранения данных о точках — поврежденных участках дороги. Задан endpoint для отправки данных о точках на сервер и endpoint для получения данных обо всех точках, хранящихся на сервере.
import copy
import uvicorn
import time
from fastapi import FastAPI, File, UploadFile
from fastapi.responses import JSONResponse
from pydantic import BaseModel
from typing import List, Dict
class PointsRequest(BaseModel):
type: str
number: int
count: int
x: int
y: int
@app.post("/points")
async def post_points(request: List[PointsRequest]):
global points
points = []
for point in request:
points.append({"type": point.type, "number": point.number, "count": point.count, "x": point.x, "y": point.y})
return {"status": "OK", "detail": None}
@app.get("/points")
async def get_points():
print(points)
return {"status": "OK", "detail": points}
if __name__ == "__main__":
uvicorn.run(app, host="0.0.0.0", port=8000)Сервер является промежуточным звеном для передачи метаданных через IP-сеть.
Для обращения к серверу необходимо организовать соответствующие функции. Ниже представлен пример их реализации в классеServer. import requests
class Server:
def __init__(self):
self.base_url = "http://172.16.65.50:8000"
def send_points(self, points: list) -> bool:
ans = requests.post(f"{self.base_url}/points", json=points)
if ans.status_code != 200:
return False
return ans.json()["status"] == "OK"
def get_points(self) -> list:
ans = requests.get(f"{self.base_url}/points")
if ans.status_code != 200:
return []
return ans.json()["detail"]Ниже представлен код приложения, которое отправляет данные о поврежденных участках дороги на сервер, а затем получает их обратно и отображает карту на основе этих данных.
Класс DamagePoint реализует структуру для хранения информации о поврежденных участках. Метод json возвращает словарь с данными о поврежденной точке, который можно использовать для отправки на сервер.
class DamagePoint:
def __init__(self, x, y, damage_type, visit_count, number):
self.x: int = x
self.y: int = y
self.damage_type = damage_type
self.visit_count: int = visit_count
self.number: int = number
def json(self):
return {"type": self.damage_type, "number": self.number, "count": self.visit_count, "x": self.x, "y": self.y}Функция send_all_points отправляет все поврежденные точки на сервер. Если отправка успешна, выводит сообщение об этом.
def send_all_points(points: List[DamagePoint]):
data = []
for point in points:
data.append(point.json())
if server.send_points(data):
print("Data was sent to server!")
else:
print("Error in sanding data!")Функция draw_points отображает поврежденные точки на изображении. На месте каждой точки рисуется круг, и рядом с ним отображается информация о типе повреждения, количестве посещений беспилотником и порядковый номер.
image_path = "./image.jpg"
image = cv2.imread(image_path)
image = cv2.resize(image, (815, 600))
original_image = image.copy()
damage_points = []
def draw_points():
global image
image = original_image.copy()
for idx, point in enumerate(damage_points):
cv2.circle(image, (point.x, point.y), 5, (0, 0, 255), -1)
text = f"{point.damage_type}/{point.visit_count}/
{point.number}"
cv2.putText(image, text, (point.x - 20, point.y - 15),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 2)
cv2.imshow("Map", image)Функция update_points обновляет список поврежденных точек, получая их с сервера, заново рисует точки и выводит актуальную информацию о них.
def update_points():
global damage_points, biggest_num
damage_points = []
server_points = server.get_points()
biggest_num = 0
for point in server_points:
biggest_num = max(biggest_num, point["number"])
damage_points.append(DamagePoint(point["x"], point["y"],
point["type"], point["count"], point["number"]))
draw_points()
def main():
draw_points()
while True:
key = cv2.waitKey(1) & 0xFF
update_points()
if key == 27:
break
cv2.destroyAllWindows()
if __name__ == "__main__":
main()Порядок действий:
- Участники демонстрируют организатору карту полигона с возможностью ручного добавления и удаления поврежденных участков дороги.
- Организатор случайным образом размещает их на полигоне, а участники — наносят на карту.
- Организатор устанавливает АЙКАР на трассу.
- По команде организатора участники запускают программы.
- Беспилотный автомобиль проезжает по всем поврежденным участкам, и в этот момент получает данные от акселерометров.
Подзадача считается выполненной, если:
- беспилотный автомобиль побывал на всех разрушенных участках дороги;
- при каждом посещении поврежденного участка беспилотник отправлял запрос акселерометрам;
- счетчик посещений каждого такого участка отображал верное число посещений и увеличивался в реальном времени;
- после остановки беспилотника на компьютере оператора выводятся все данные, полученные от акселерометров.
16 баллов — посещены все поврежденные участки на карте и обновлена информация о них. Представлены три набора статистических данных.
Комментарии
Это самая сложная и ресурсозатратная подзадача из подзадач беспилотного автомобиля! Для ее решения следует дополнить код из предыдущей подзадачи.
Необходимо реализовать:
- интерфейс, позволяющий установить на карте поврежденные участки;
- алгоритм поиска маршрута по городу, который охватывает все разрушенные участки;
- такое взаимодействие беспилотника и карты, при котором счетчик посещений поврежденных участков на карте обновляется в реальном времени (то есть как только беспилотник проезжает по поврежденному участку, на карте отображается новое число посещений).
Типовые ошибки при выполнении подзадачи:
- интерфейс не позволяет задать положение поврежденного участка;
- некорректно изменяется число посещений беспилотным автомобилем: увеличивается больше, чем на 1, либо не увеличивается вовсе;
- беспилотник неверно строит маршрут и не посещает все поврежденные участки дороги.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для передачи данных между беспилотным автомобилем и компьютером, отображающим карту, удобно использовать FastAPI-сервер из предыдущей подзадачи, дополненный функциями для передачи задачи беспилотному автомобилю.
Задача — последовательность поворотов, которые необходимо совершить, и id поврежденых точек, которые нужно посетить. Кроме того, необходимо добавить функцию для увеличения на сервере счетчика посещений точки с конкретным id. Ниже представлен программный код, реализующий эти дополнения.
@app.post("/task")
async def post_task(request: List[str]):
global tasks
tasks = request
return {"status": "OK", "detail": None}
@app.get("/task")
async def get_task():
global tasks
tasks_copy = copy.deepcopy(tasks)
tasks = []
return {"status": "OK", "detail": tasks_copy}
@app.post("/point")
async def visit_point(number: int):
for i in range(len(points)):
if points[i]["number"] == number:
points[i]["count"] += 1
return {"status": "OK", "detail": None}
return {"status": "ER", "detail": "Number not found"}К классу Server из предыдущей подзадачи добавлены методы для новых взаимодействий с сервером.
def send_task(self, tasks: list) -> bool:
ans = requests.post(f"{self.base_url}/task", json=tasks)
print(ans.json())
if ans.status_code != 200:
return False
return ans.json()["status"] == "OK"
def get_task(self) -> list:
ans = requests.get(f"{self.base_url}/task")
if ans.status_code != 200:
return []
return ans.json()["detail"]
def visit_point(self, number) -> list:
ans = requests.post(f"{self.base_url}/point?number={number}")
if ans.status_code != 200:
return []
return ans.json()["status"]Наибольшее количество изменений требуется внести в программу, отвечающую за отображение карты, а именно:
- возможность размещать точки на карте с помощью мыши;
- алгоритм для формирования задания для беспилотного автомобиля.
Новая функция mouse_callback обрабатывает события, связанные с мышью. При нажатии левой кнопки мыши добавляется новая поврежденная точка или удаляется существующая. При нажатии правой кнопки мыши устанавливаются стартовая и конечная точки для беспилотника.
robot_zone = None
stop_zone = None
freeze_zone = None
def mouse_callback(event, x, y, flags, param):
global damage_points, robot_zone, biggest_num, stop_zone, freeze_zone
if event == cv2.EVENT_LBUTTONDOWN:
for i, point in enumerate(damage_points):
if abs(point.x - x) < 10 and abs(point.y - y) < 10:
print(f"Удаление точки: {point.damage_type}")
del damage_points[i]
draw_points()
send_all_points(damage_points)
return
damage_type = input("Тип повреждения: ")
damage_point = DamagePoint(x, y, damage_type, 0, biggest_num + 1)
biggest_num += 1
damage_points.append(damage_point)
send_all_points(damage_points)
draw_points()
elif event == cv2.EVENT_RBUTTONDOWN:
if not robot_zone:
robot_zone, _ = DamagePoint(x, y, 0, 0, 0).get_zone()
print(f"Робот установлен в зону {robot_zone}")
freeze_zone = input("Зона для установки: ")
print("Нажмите на точку остановки")
else:
stop_zone, _ = DamagePoint(x, y, 0, 0, 0).get_zone()
if robot_zone and stop_zone:
plan_robot_route()Функция plan_robot_route вызывается после установки всех точек на карте. Она формирует список действий, которые должен выполнить робот, и отправляет его на сервер.
def plan_robot_route():
if not robot_zone:
print("Зона беспилотника не установлена.")
return
target_zones = {dp.get_zone()[0] for dp in damage_points}
if not target_zones:
print("Точек нет")
return
route, visited = find_optimal_route(robot_zone, target_zones)
vis_cnt = 0
task = []
for i in range(len(route) - 1):
for neighbor, action in graph.get(route[i], []):
if neighbor == route[i + 1]:
task.append(action)
while (vis_cnt < len(visited) and i + 1 ==
visited[vis_cnt][0] - 1):
if freeze_zone == visited[vis_cnt][1]:
pass
else:
task.append(visited[vis_cnt][1])
vis_cnt += 1
break
task.append("f")
print(task)
print(visited)
server.send_task(task)В приведенном коде используется функция find_optimal_route, которая определяет последовательность поворотов, необходимых беспилотнику для посещения всех поврежденных участков дорожного покрытия.
def find_optimal_route(start, targets):
print(targets)
targets = set(targets)
visited = []
current_zone = start
route = [current_zone]
while targets:
best_next_zone = None
best_path = None
min_turns = 1e9
for target in targets:
path = find_shortest_path(current_zone, target)
turns = len(path)
if turns < min_turns:
min_turns = turns
best_next_zone = target
best_path = path
if best_next_zone:
route.extend(best_path[1:])
for pt in find_all_points(best_next_zone, damage_points):
visited.append((len(route), pt))
targets.remove(best_next_zone)
current_zone = best_next_zone
path = find_shortest_path(current_zone, stop_zone)
route.extend(path[1:])
return route, visitedДля работы с точками и поиска пути через них используются зоны. Зоны — это абстракция, представляющая каждый участок дорожной полосы между двумя перекрестками. Чтобы определить, в какой именно зоне находится конкретная точка, используется заранее сформированный json-файл с соответствием пикселей изображения и id конкретных зон.
def get_zone(self):
nearest_zone = None
min_distance = 1e9
percent_position = 0
for zone_id, points in lines.items():
points = np.array(points)
distances = np.linalg.norm(points - np.array((self.x,
self.y)), axis=1)
min_idx = np.argmin(distances)
min_dist = distances[min_idx]
if min_dist < min_distance:
min_distance = min_dist
nearest_zone = zone_id
percent_position = (min_idx / (len(points) - 1)) * 100
return nearest_zone, float(round(percent_position, 2))Ниже приведен код еще двух функций find_shortest_path и find_all_points, они используются при формировании задания для беспилотника.
find_all_points находит все поврежденные точки в заданной зоне и возвращает их номера, отсортированные по порядку расположения в зоне.
find_shortest_path находит кратчайший путь от начальной точки до целевой точки, используя алгоритм поиска в ширину (BFS). Возвращает список зон, составляющих путь. Граф, в котором осуществляется поиск, задается словарем.
graph = {
"6": [("10", "STRAIGHT"), ("9", "LEFT")],
"7": [("15", "RIGHT")],
"8": [("7", "RIGHT"), ("10", "LEFT")],
"9": [("13", "RIGHT"), ("16", "LEFT")],
"10": [("14", "LEFT")],
"11": [("9", "RIGHT"), ("7", "STRAIGHT")],
"13": [("11", "RIGHT")],
"14": [("16", "STRAIGHT"), ("8", "LEFT")],
"15": [("8", "RIGHT"), ("13", "STRAIGHT")],
"16": [("6", "LEFT")]
}
def find_shortest_path(start, target):
queue = deque([(start, [], None)])
visited = set()
while queue:
current_zone, path, last_direction = queue.popleft()
if current_zone == target:
return path + [current_zone]
if current_zone in visited:
continue
visited.add(current_zone)
for neighbor, direction in graph.get(current_zone, []):
if neighbor not in visited:
queue.append((neighbor, path + [current_zone], direction))
return []
def find_all_points(zone, damage_points):
data = []
for point in damage_points:
if point.get_zone()[0] == zone:
data.append((point.number, point.get_zone()[1]))
return [f"{dt[0]}" for dt in sorted(data, key=lambda x: x[1])]Таким образом, беспилотный автомобиль может запрашивать с сервера задание, состоящее из последовательности поворотов и id точек, которые необходимо посетить. Беспилотник делает это до тех пор, пока не получит его, а затем формирует список маневров, которые необходимо совершить, и список id точек для посещения.
data = server.get_task()
while len(data) == 0:
data = server.get_task()
time.sleep(0.5)
algorithm = []
points = []
points_cnt = 0
prev_r = 0
prev_l = 0
for step in data:
if step == "STRAIGHT":
algorithm.append(CROSS_STRAIGHT)
elif step == "RIGHT":
algorithm.append(CROSS_RIGHT)
elif step == "LEFT":
algorithm.append(CROSS_LEFT)
else:
points.append(step)В основном цикле обработки кадров, аналогично БПА-3 выполнено обнаружение поврежденных участков дороги.
if detect_yolo(trans_perspective(frame, TRAP, RECT, SIZE)):
detect_count += 1
print("temp detected", detect_count)
if time.time() - last_acur_detect > 2 and detect_count > 2:
last_acur_detect = time.time()
print("DETECTED!")
server.visit_point(points[points_cnt])
points_cnt += 1
# Получение и вывод данных от акселерометра
client.send()
response = client.get_output()
print(response)
if detect_count > 2:
last_acur_detect = time.time()
last_detect = time.time()При обнаружении очередного поврежденного участка дороги беспилотный автомобиль увеличивает счетчик посещенных участков — по номеру встреченного участка находит его идентификатор в заранее полученном списке, а затем отправляет серверу сообщение о его посещении. Сервер обновляет счетчик для данного участка, и эта информация отображается на карте, так как карта постоянно запрашивает сервер о статусе точек и обновляет их отображение.
Порядок действий:
- Участники демонстрируют организатору карту полигона с возможностью ручного добавления и удаления поврежденных участков дороги.
- Организатор случайным образом размещает на полигоне поврежденные участки, а участники наносят их на карту.
- Организатор устанавливает АЙКАР на трассу.
- По команде участники запускают программы.
- Организатор сообщает номер участка, пробы которого необходимо взять.
- Участники передают номер участка в программу через стандартный поток ввода.
- Беспилотник доезжает до указанного участка, берет пробы дорожного полотна, доставляет в зону приема проб ЛВА.
Подзадача считается полностью выполненной, если:
- АЙКАР доехал до указанного участка, остановился и вывел в терминал SSH соединения сообщение
collecting samples of the road surface; - после вывода сообщения беспилотник доехал и остановился в зоне приема проб ЛВА;
- разработчик просмотрел код запущенных программ и признал его рабочим.
6 баллов — получен один набор статистических данных.
Комментарии
Решение этой подзадачи предполагает объединение программ, разработанных для решения БПА-2, БПА-3, БПА-5.
Типовые ошибки при выполнении подзадания:
- не останавливается для взятия пробы;
- берет пробу не того поврежденного участка, который указан на старте испытаний;
- не останавливается в зоне приема проб ЛВА.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
В решение для БПА-5 необходимо внести изменение. Из всех точек (поврежденных участков) необходимо выделить ту, на которой необходимо остановиться и взять пробы дорожного полотна. После составлении задания для беспилотника ему передается список c id точек посещения. Точка, на которой необходимо взять пробы, отмечается отдельно! Метка добавляется в функции plan_robot_route.
while vis_cnt < len(visited) and i + 1 == visited[vis_cnt][0] - 1:
if freeze_zone == visited[vis_cnt][1]:
task.append(visited[vis_cnt][1] + "_f")
else:
task.append(visited[vis_cnt][1])
vis_cnt += 1
breakБеспилотный автомобиль, выполняя задание, проверяет, к какой точке он прибыл, и если это точка для взятия проб, переходит в специальное состояние FREEZE.
if detect_yolo(trans_perspective(frame, TRAP, RECT, SIZE)) and not need_we_stop(frame):
detect_count += 1
print("temp detected", detect_count)
if time.time() - last_acur_detect > 2 and detect_count > 4:
last_acur_detect = time.time()
print("DETECTED!")
point = points[points_cnt]
if "_f" in point:
print("collecting samples of the road surface")
point = point.split("_")[0]
STATE = FREEZE
freeze_start = time.time()
server.visit_point(point)
points_cnt += 1Специальное состояние обрабатывается так, чтобы беспилотник остановился на 2 с.
if STATE == FREEZE and time.time() - freeze_start > 2:
STATE = GO
if STATE != STOP and STATE != FREEZE:
arduino.set_speed(CAR_SPEED)
arduino.set_angle(angle)
else:
arduino.stop()Функции поиска поврежденных участков дороги аналогичны БПА-3. Функции обнаружения зоны приема проб ЛВА и остановки в ней аналогичны БПА-2.
Порядок действий:
- Участники демонстрируют организатору карту полигона с возможностью ручного добавления и удаления поврежденных участков дороги.
- Организатор случайным образом размещает на полигоне поврежденные участки.
- Участники наносят поврежденные участки на карту.
- Организатор устанавливает АЙКАР на трассу.
- По команде организатора участники запускают программы.
- Организатор сообщает номер участка, который необходимо обследовать.
- Участники передают номер участка в программу через стандартный поток ввода.
- Беспилотник проезжает по поврежденному участку дороги, получает данные от акселерометров и выводит в терминал SSH-соединения оставшийся срок службы дорожного полотна.
Подзадача считается выполненной, если:
- беспилотный автомобиль отправил запрос акселерометрам в момент движения через поврежденный участок дороги;
- в терминал SSH-соединения с автомобилем выведен оставшийся срок службы участка дороги с ошибкой менее 10%,
- разработчик просмотрел код запущенных программ и признал его рабочим;
- испытание успешно пройдено два раза подряд.
6 баллов — получен один набор статистических данных.
Комментарии
Для решения этой подзадачи нужно обучить регрессионную модель машинного обучения — по показаниям акселерометра предсказывает оставшийся срок службы поврежденного участка дороги. Срок измеряется в количестве проездов беспилотного автомобиля, которое участок сможет выдержать до полного разрушения.
За выполнение подзадач БПА-5, БПА-6, ЛВА-3, ЛВА-4, БПЛА-4, БПЛА-5 участники получают не только баллы, но и наборы статистических данных — информацию о разрушении конкретного участка дорожного покрытия. В одном таком наборе данных представлены:
- изображения повреждений дорожного полотна;
- данные от акселерометров;
- изображение пробы покрытия дорожного полотна для всех возможных сроков службы этого участка.
В CSV-файле, прилагающемуся к набору данных, устанавливается соответствие между изображениями повреждений, показаниями акселерометра и оставшимся сроком службы дорожного полотна.
При выполнении подзадачи участникам предоставляются только те данные от акселерометра, которые позволяют однозначно определить оставшийся срок службы покрытия.
Типовые ошибки при выполнении подзадачи:
- отсутствие анализа и очистки датасета перед обучением нейронной сети;
- разные версии фреймворка на устройстве инференса и устройстве для обучения нейронных сетей.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для определения оставшегося срока службы дорожного участка лучше всего использовать нейронные сети. Анализируя статистические наборы данных, становится ясно, что дорожное полотно разрушается по восьми различным сценариям.
Трудность заключается в том, что в некоторых сценариях на начальном или конечном этапе жизни дорожного полотна показания акселерометра неизменны. Когда половина данных не содержит вариаций, модель не получает полезных градиентов для обучения на этой части.
Такое положение может приводить к тому, что оптимизатор «перестанет обращать внимание» на эту часть данных или будет пытаться компенсировать отсутствие различий в сигналах за счет искусственного завышения весов на изменяемой части. Это снизит общую обобщающую способность модели и не позволит достичь необходимой точности. Для преодоления проблемы участникам следует удалить из датасета неинформативные данные.
Задачу можно решить с помощью единственной модели машинного обучения, которая будет одновременно выполнять классификацию сценариев и регрессию для каждого из них. На начальном этапе обработки данных можно объединить представление классификационной ветви с представлением энкодера через конкатенацию, что позволит регрессионной ветви адаптировать свои предсказания в зависимости от идентифицированного сценария разрушения. Однако такой подход требует глубоких знаний в области машинного обучения и большого объема данных для обучения.
Более простой вариант заключается в том, чтобы обучить классификатор, который определит сценарий разрушения, а затем для каждого сценария обучить отдельную регрессионную модель.
Ниже представлен код для формирования архитектуры классификатора, его обучения и сохранения обученной модели. Параметры обучения подбираются экспериментально.
import numpy as np
import tensorflow as tf
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Conv1D, MaxPooling1D, Flatten, Dense, Dropout
# Параметры
SEQ_LENGTH = 200
NUM_CLASSES = 8
# Создаем модель классификатора с использованием одномерных сверточных слоев.
input_shape = (SEQ_LENGTH, 1)
model = Sequential(name="Conv1D_Classifier")
model.add(Conv1D(filters=32, kernel_size=3,
activation='relu', padding='same', input_shape=input_shape))
model.add(MaxPooling1D(pool_size=2))
model.add(Dropout(0.3))
model.add(Conv1D(filters=64, kernel_size=3, activation='relu', padding='same'))
model.add(MaxPooling1D(pool_size=2))
model.add(Dropout(0.3))
model.add(Conv1D(filters=128, kernel_size=3, activation='relu', padding='same'))
model.add(MaxPooling1D(pool_size=2))
model.add(Dropout(0.3))
model.add(Flatten())
model.add(Dense(64, activation='relu'))
# Выходной слой: NUM_CLASSES нейронов, softmax активация для классификации
model.add(Dense(NUM_CLASSES, activation='softmax'))
# learning_rate подбирается экспериментально
model.compile(optimizer=tf.keras.optimizers.Adam(learning_rate=1e-3),
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
model.summary()
# Параметры обучения
epochs = 10
batch_size = 10
# Обучение модели
history = model.fit(
X_train, Y_train,
epochs=epochs,
batch_size=batch_size,
validation_data=(X_test, Y_test))
# Сохранение модели
model.save("Class.h5")Модель различает восемь классов сценариев разрушения, и для каждого обучается регрессионная модель, при этом их архитектуры будут одинаковы. Параметры обучения для каждой модели подбираются экспериментально. Ниже представлен код создания, обучения и сохранения регрессионной модели.
import numpy as np
import tensorflow as tf
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Conv1D, MaxPooling1D, Flatten, Dense, Dropout
# Параметры генератора
SEQ_LENGTH = 200
BATCH_SIZE = 32
# Создаем модель для регрессии.
input_shape = (SEQ_LENGTH, 1)
model = Sequential(name="Conv1D_Regressor")
model.add(Conv1D(filters=32, kernel_size=3, activation='relu', padding='same', input_shape=input_shape))
model.add(MaxPooling1D(pool_size=2))
model.add(Dropout(0.3))
model.add(Conv1D(filters=64, kernel_size=3, activation='relu', padding='same'))
model.add(MaxPooling1D(pool_size=2))
model.add(Dropout(0.3))
model.add(Conv1D(filters=128, kernel_size=3, activation='relu', padding='same'))
model.add(MaxPooling1D(pool_size=2))
model.add(Dropout(0.3))
model.add(Flatten())
model.add(Dense(64, activation='relu'))
model.add(Dense(1, activation='linear')) # выходной нейрон для регрессионного предсказания
# learning_rate подбирается экспериментально
model.compile(optimizer=tf.keras.optimizers.Adam(learning_rate=1e-3),
loss='mse',
metrics=['mae'])
model.summary()
# Параметры обучения
steps_per_epoch = 100 # батчей на эпоху
epochs = 10
# Обучение модели
history = model.fit(
X_train, Y_train,
epochs=epochs,
batch_size=batch_size,
validation_data=(X_test, Y_test))
# Сохранение модели
model.save("Regress_0.h5")Для каждого сценария разрушения обучаем свою модель. В ходе работы беспилотника каждую модель нужно применить лишь один раз, соответственно, загружать их из файлов и проводить инференс уместно в момент, когда беспилотник получил данные от акселерометра для целевого поврежденного участка.
Сначала беспилотник останавливается, затем загружается и используется классификатор. Он определяет, по какому сценарию разрушается участок дороги, далее используется регрессионная модель для конкретного сценария.
if detect_yolo(trans_perspective(frame, TRAP, RECT, SIZE)):
detect_count += 1
print("temp detected", detect_count)
if time.time() - last_acur_detect > 2 and detect_count > 2:
last_acur_detect = time.time()
print("DETECTED!")
server.visit_point(points[points_cnt])
points_cnt += 1
# Останавливаем беспилотник
arduino.stop()
# Получаем данные от акселерометра
client.send()
response = client.get_output()
# print(response)
# Загружаем модель классификатора из файла
model = load_model('Class.h5')
X_test = string_to_numpy_array(strintg_chis)
X_test = np.expand_dims(X_test, axis=1)
X_test = np.expand_dims(X_test, axis=0)
# Определяем класс сценария разрушения
y_pred = model.predict(X_test)
predicted_classes = np.argmax(y_pred, axis=1)
# print("Предсказанный класс:", predicted_classes[0])
next_model_name = ["Regress_1.h5", "Regress_2.h5", "Regress_3.h5",
"Regress_4.h5", "Regress_5.h5", "Regress_6.h5",
"Regress_7.h5", "Regress_8.h5"]
# Загружаем регрессионную модель для конкретного сценария
model = load_model(next_model_name[predicted_classes[0]])
# Определяем оставшийся срок службы и выводим в терминал
y_pred = model.predict(X_test)
y_pred = round(y_pred[0][0])
print(y_pred)При подготовке данных от акселерометра для передачи на вход нейронной сети используется функция, переводящая строку чисел разделенных пробелами в массив numpy:
# Функция для перевода данных от акселерометра к массиву numpy
def string_to_numpy_array(data_string: str, dtype=float) -> np.ndarray:
string_numbers = data_string.split()
numeric_values = list(map(dtype, string_numbers))
numpy_array = np.array(numeric_values)
return numpy_array| Описание подзадачи | Примечания | Баллы за подзадачу |
|---|---|---|
| Коммутация электронных модулей беспилотного автомобиля | 1 | |
| Старт при исчезновении запрещающего знака и остановка в зоне приема проб дорожного полотна ЛВА | 2 — беспилотник остановился в зоне приема проб ЛВА; 3 — беспилотник стартовал при исчезновении знака. |
5 |
| Получение данных от акселерометров на колесной паре беспилотного автомобиля | 4 | |
| Получение карты расположения поврежденных участков дорожного полотна от квадрокоптера | 5 | |
| Посещение всех поврежденных участков на карте и обновление информации о них | 16 | |
| Взятие проб дорожного полотна и их доставка в ЛВА. | 6 | |
| Определение оставшегося срока службы поврежденного участка дороги по данным акселерометра | 6 | |
| Сумма баллов за все подзадачи | 43 |
Порядок действий:
- По команде организатора участники запускают программу.
- Организатор сообщает участникам номер пробы от 1 до 12. Через стандартный ввод номер пробы передается в программу.
- Манипулятор захватывает пробу с указанным номером, подносит ее к камере и возвращает на место.
Задание считается полностью выполненным, если последовательно выполнены следующие условия:
- манипулятор захватил пробу и поднес ее к камере;
- на экране оператора появилось изображение с камеры ЛВА;
- манипулятор вернул пробу в исходное положение;
- в процессе транспортировки проба не касалась других проб;
- испытание успешно пройдено два раза подряд.
2 балла — произведена транспортировка пробы.
Типовые ошибки при выполнении подзадачи:
- попытки перемещать захват через запрещенную область;
- одновременное понижение высоты и сжимание захвата.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для выполнения этого задания участникам необходимо разобраться в предоставленном им API управления промышленным манипулятором.
Для каждого действия, которое может совершать манипулятор, нужно организовать отдельные функции. Функция capture_sample применяется для захвата пробы с конкретным номером.
def capture_sample(robot, sample_number):
# Функция для захвата пробы с указанным номером
sample_positions = {
1: (450, -400, 95),
2: (550,-400, 95),
3: (650, -400, 95),
4: (650,-300, 95),
5: (550, -300, 95),
6: (650,-200,95 ),
7: (650, 260,95),
8: (650,360,95),
9: (550, 360,95),
10: (650,460,95),
11: (550, 460,95),
12: (450,460,95), }
if sample_number not in sample_positions:
print("Некорректный номер пробы")
return False
x, y, z = sample_positions[sample_number]
robot.move("Robot1_1", 489, -131.1, 424, 0, 0)
# Перемещение к пробе
robot.move("Robot1_1", x, y, z, 0, 0)
time.sleep(2) # Ожидание завершения движения
# Захват пробы
robot.move("Robot1_1", x, y, z, 0, 1) # Активировать захват
time.sleep(1)
return TrueФункция transport_to_camera отвечает за перемещение пробы к объективу камеры.
def transport_to_camera(robot):
#Функция для транспортировки пробы к камере.
# Координаты камеры
camera_position = (670, -511, 311.5)
# Перемещение к камере
robot.move("Robot1_1", *camera_position, 0, 1)
time.sleep(2)
# Получение изображения с камеры
image_byte = robot.getCamera1Image()
if image_byte:
image_np = np.frombuffer(image_byte, np.uint8)
image_np = cv2.imdecode(image_np, cv2.IMREAD_COLOR)
cv2.imshow("Camera Image", image_np)
cv2.waitKey(1)
time.sleep(5) # Ожидание для просмотра изображения
cv2.destroyAllWindows()
else:
print("Ошибка получения изображения с камеры")
return False
return TrueФункция return_sample возвращающая пробу на исходную позицию.
def return_sample(robot, sample_number):
# Функция для возврата пробы на место.
sample_positions = {
1: (450, -400, 95),
2: (550,-400, 95),
3: (650, -400,95),
4: (650,-300, 95),
5: (550, -300, 95),
6: (650,-200, 95),
7: (650, 260,95),
8: (650,360,95),
9: (550, 360,95),
10: (650,460,95),
11: (550, 460,95),
12: (450,460,95),}
if sample_number not in sample_positions:
print("Некорректный номер пробы")
return False
x, y, z = sample_positions[sample_number]
# Перемещение к месту возврата
robot.move("Robot1_1", x, y, z, 0, 1)
time.sleep(2)
# Отпускание пробы
robot.move("Robot1_1", x, y, z, 0, 0) # Деактивировать захват
time.sleep(1)
return TrueОсновная логика работы реализована в функции main. Она запускает цикл, который продолжается, пока не будет выполнено одно успешное испытание. У пользователя запрашивается номер пробы (образца). Проводится проверка корректности номера, после чего вызываются функции capture_sample, transport_to_camera и return_sample.
Если какая-то из функций возвращает False, выводится сообщение об ошибке и продолжается цикл. В случае, когда все операции выполнены успешно, счетчик увеличивает число успешных запусков и выводит сообщение об успешном завершении испытания. После успешного завершения всех операций выводится сообщение о завершении задания.
def main():
robot = MCX()
successful_runs = 0
while successful_runs < 1:
# Запрос номера пробы
sample_number = int(input("Введите номер пробы (1-12): "))
if sample_number < 1 or sample_number > 12:
print("Некорректный номер пробы. Введите число от 1 до 12.")
continue
# Захват пробы
if not capture_sample(robot, sample_number):
print("Ошибка захвата пробы")
continue
# Транспортировка к камере
if not transport_to_camera(robot):
print("Ошибка транспортировки к камере")
continue
# Возврат пробы на место
if not return_sample(robot, sample_number):
print("Ошибка возврата пробы")
continue
# Успешное выполнение
print(f"Испытание {successful_runs + 1} успешно завершено")
successful_runs += 1
print("Задание выполнено успешно 2 раза подряд.")
if __name__ == "__main__":
main()Стартовые условия аналогичны предыдущей подзадаче.
Задание считается полностью выполненным, если последовательно выполнены следующие условия:
- манипулятор захватил пробу и поднес ее к камере;
- на экране оператора появились восемь изображений пробы под разными углами с шагом в 45°;
- манипулятор вернул пробу в исходное положение;
- в процессе транспортировки проба не касалась других проб.
4 балла — произведен осмотр пробы с разных ракурсов.
Типовые ошибки при выполнении подзадачи:
- неверно определенные углы, под которыми нужно фотографировать образец перед объективом камеры;
- вызов API манипулятора без проверки завершения выполнения предыдущего вызова.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
При решении этой подзадачи используются программы из предыдущей подзадачи.
Необходимо сократить функцию transport_to_camera и вынести в функцию capture_images процесс получения восемь изображений пробы под разными углами.
def transport_to_camera(robot):
#Функция для транспортировки пробы к камере.
camera_position = (670, -511, 311.5) # Координаты камеры
# Перемещение к камере
robot.move("Robot4_1", *camera_position, 0, 1)
while robot.getManipulatorStatus() == 1: # Ожидание завершения движения
time.sleep(0.1)
return True
def capture_images(robot):
#Функция для получения 8 изображений пробы под разными углами.
angles = [0, 45, 90, 135, 180, -135, -90, -45] # Углы для поворота (в пределах [-180°, 180°])
images = []
for angle in angles:
# Поворот кисти манипулятора на заданный угол
robot.move("Robot4_1", 670, -511, 311.5, angle, 1)
while robot.getManipulatorStatus() == 1: # Ожидание завершения движения
time.sleep(0.1)
# Получение изображения с камеры
image_byte = robot.getCamera1Image()
if image_byte:
image_np = np.frombuffer(image_byte, np.uint8)
image_np = cv2.imdecode(image_np, cv2.IMREAD_COLOR)
images.append(image_np)
# Отображение изображения в отдельном окне
window_name = f"Camera Image {angle}°"
cv2.imshow(window_name, image_np)
cv2.waitKey(500) # Кратковременное отображение изображения
else:
print(f"Ошибка получения изображения под углом {angle}°")
return False
# Ожидание нажатия клавиши для закрытия окон
print("Нажмите любую клавишу, чтобы закрыть окна с изображениями.")
cv2.waitKey(0)
cv2.destroyAllWindows()
return TrueФункция main теперь выглядит следующим образом.
def main():
robot = MCX()
successful_runs = 0
while successful_runs < 1: # Достаточно одного успешного выполнения
# Запрос номера пробы
sample_number = int(input("Введите номер пробы (1-12): "))
if sample_number < 1 or sample_number > 12:
print("Некорректный номер пробы. Введите число от 1 до 12.")
continue
# Захват пробы
if not capture_sample(robot, sample_number):
print("Ошибка захвата пробы")
continue
# Транспортировка к камере
if not transport_to_camera(robot):
print("Ошибка транспортировки к камере")
continue
# Осмотр пробы с разных ракурсов
if not capture_images(robot):
print("Ошибка получения изображений")
continue
# Возврат пробы на место
if not return_sample(robot, sample_number):
print("Ошибка возврата пробы")
continue
# Успешное выполнение
print(f"Испытание успешно завершено")
successful_runs += 1Если в процессе выполнения задания появляются ошибки, и манипулятор не выполнит какую-то из промежуточных операций, то выполнение задания начинается заново.
Стартовые условия аналогичны предыдущей подзадаче, за исключением того, что оператор сообщает, а участники вводят в программу четыре номера проб.
Задание считается полностью выполненным, если последовательно выполнены следующие условия:
- манипулятор поочередно поднес указанные пробы к камере;
- манипулятор вернул все пробы в исходное положение;
- по итогам работы программы на компьютере оператора появились четыре видеозаписи с камеры лаборатории;
- на видео видно пробы со всех 360°.
7 баллов — три набора статистических данных.
Типовые ошибки при выполнении подзадачи:
- получение всех сообщений сразу, без выполнения соответствующих запросам действий;
- попытка подключения обеих программ к инициализированному сокету;
- отсутствие ответных сообщений на запросы.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения подзадачи нужно использовать код из подзадачи ЛВА-2.
Дополнительно необходимо организовать функцию record_video для записи и сохранения видеофайла.
def record_video(robot, sample_number, output_folder):
# Функция для записи видео с поворотом пробы на 360°.
# Создаем папку для сохранения видео, если ее нет
if not os.path.exists(output_folder):
os.makedirs(output_folder)
# Настройки записи видео
video_filename = os.path.join(output_folder,
f"sample_{sample_number}.avi")
fourcc = cv2.VideoWriter_fourcc(*'MJPG')
fps = 10 # Частота кадров
frame_size = (640, 480)
# Размер кадра (зависит от разрешения камеры)
# Инициализация VideoWriter
out = cv2.VideoWriter(video_filename, fourcc, fps, frame_size)
# Углы для поворота (360° с шагом 45°)
angles = [-135, -90, -45, 0, 45, 90, 135, 180]
for angle in angles:
# Поворот кисти манипулятора на заданный угол
robot.move("Robot4_1", 670, -511, 311.5, angle, 1)
while robot.getManipulatorStatus() == 1:
# Ожидание завершения движения
time.sleep(1)
# Получение изображения с камеры
image_byte = robot.getCamera1Image()
if image_byte:
image_np = np.frombuffer(image_byte, np.uint8)
image_np = cv2.imdecode(image_np, cv2.IMREAD_COLOR)
out.write(image_np) # Запись кадра в видео
else:
print(f"Ошибка получения изображения под углом {angle}°")
return False
# Завершение записи видео
out.release()
print(f"Видео для пробы {sample_number} сохранено в
{video_filename}")
return TrueЛогику работы функции main необходимо скорректировать для получения видеороликов с обзором четырех проб.
def main():
robot = MCX()
output_folder = "videos" # Папка для сохранения видео
# Запрос 4 номеров проб
sample_numbers = []
for i in range(4):
sample_number = int(input(f"Введите номер пробы
{i + 1} (1-12): "))
if sample_number < 1 or sample_number > 12:
print("Некорректный номер пробы. Введите число от 1 до 12.")
return
sample_numbers.append(sample_number)
# Обработка каждой пробы
for sample_number in sample_numbers:
# Захват пробы
if not capture_sample(robot, sample_number):
print(f"Ошибка захвата пробы {sample_number}")
continue
# Транспортировка к камере
if not transport_to_camera(robot):
print(f"Ошибка транспортировки пробы
{sample_number} к камере")
continueСтартовые условия аналогичны ЛВА-1. После осмотра пробы в терминал SSH-соединения выводится тип (класс) пробы.
Задание считается полностью выполненным, если выполнены следующие условия:
- манипулятор захватил пробу и поднес ее к камере;
- манипулятор вернул пробу в исходное положение;
- в процессе транспортировки проба не касалась других проб;
- в терминале SSH-соединения выведен верный тип пробы;
- испытание успешно пройдено три раза подряд.
7 баллов — получен один набор статистических данных.
Комментарии
Для решения этой подзадачи участники должны были обучить модель машинного обучения, которая по изображениям образцов дорожного полотна определит их тип. Датасет для обучения нейронной сети участники собирают и размечают самостоятельно.
За выполнение подзадач БПА-5, БПА-6, ЛВА-3, ЛВА-4, БПЛА-4 и БПЛА-5 участники получают не только баллы, но и наборы статистических данных. Среди прочего в них содержатся схематичные изображения образцов дорожного полотна с обозначенными классами.
Типовые ошибки при выполнении подзадачи:
- обучение нейронной сети на изображениях из статистических наборов данных;
- использование необработанных изображений с камеры ЛВА для обучения нейронной сети.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения задачи нужно получить достаточное количество статистических наборов данных за БПА-5, БПА-6, ЛВА-3, ЛВА-4, БПЛА-4 и БПЛА-5, а также установить соответствие между пробами дорожного полотна в ЛВА и их классами. В статистических наборах данных содержатся схематичные изображения образцов дорожного полотна с обозначенными классами.
После того как соответствие установлено, следует собрать обучающий датасет для классификатора. Пробы дорожного полотна имеют цилиндрическую форму, поэтому для определения типа пробы необходимы их изображения со всех сторон. Для сбора датасета удобно использовать изображения проб с разных ракурсов, получаемые в ЛВА-2. Из каждого вырезается участок непосредственно с пробой, а затем из них создается новое изображение, которое передается на вход нейросети для классификации. Функция extract_and_concatenate его возвращает.
def extract_and_concatenate(image_list):
"""
Извлекает из каждого изображения в списке область [150:500, 400:570]
и склеивает их по горизонтали, возвращая результат как новое изображение. """
pieces = []
for img in image_list:
# Проверяем, что изображение имеет достаточную размерность
if img.shape[0] < 500 or img.shape[1] < 570:
raise ValueError("Размер изображения меньше требуемых для вырезания области [150:500, 400:570].")
# Извлекаем область. С помощью slice: [150:500, 400:570]
piece = img[150:500, 400:570].copy()
# cv2.imshow("Piece", piece)
# cv2.waitKey(0)
pieces.append(piece)
# Склейка по горизонтали, если pieces не пустой
if pieces:
concatenated_image = np.hstack(pieces)
else:
concatenated_image = None
return concatenated_imageНиже представлен код для формирования архитектуры классификатора, его обучения и сохранения обученной модели. Параметры обучения подбираются экспериментально.
import numpy as np
import cv2
import tensorflow as tf
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Conv2D, MaxPooling2D, Flatten, Dense, Dropout, BatchNormalization
from sklearn.model_selection import train_test_split
# Параметры исходного изображения
orig_height = 350
orig_width = 1360
channels = 3
# Множитель для уменьшения изображения втрое (по оси H и W)
scale = 1 / 3
# Вычисляем размеры изображения после масштабирования
resized_height = int(orig_height * scale)
resized_width = int(orig_width * scale)
# Количество классов
num_classes = 5
# Создание модели классификатора
input_shape = (resized_height, resized_width, channels)
model = Sequential(name="Image_Classifier")
model.add(Conv2D(32, (3, 3), activation='relu', padding="same",
input_shape=input_shape))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.25))
model.add(Conv2D(64, (3, 3), activation='relu', padding="same"))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.25))
model.add(Conv2D(128, (3, 3), activation='relu', padding="same"))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.25))
model.add(Flatten())
model.add(Dense(128, activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(num_classes, activation='softmax'))
# выход: 5 классов
model.compile(optimizer=tf.keras.optimizers.
Adam(learning_rate=1e-3),
loss='sparse_categorical_crossentropy', metrics=['accuracy'])
model.summary()
# Обучаем модель
epochs = 50
batch_size = 32
history = model.fit(X_train, y_train, epochs=epochs, batch_size=batch_size,
validation_data=(X_test, y_test))
# Сохранение модели
model.save("Class.h5")Функция predict_sample_type использует список изображений, полученный в capture_images из ЛВА-2. Из списка формируется изображение для передачи на вход нейросетевому классификатору.
def predict_sample_type(images_list):
model = load_model('Class.h5')
image = extract_and_concatenate(images_list)
resized_height = int(350 / 3)
resized_width = int(1360 / 3)
single_img = cv2.resize(image, (resized_width, resized_height), interpolation=cv2.INTER_LINEAR)
single_img = single_img / 255.0
# Добавляем измерение батча (получим форму (1, resized_height, resized_width, 3))
single_img_batch = np.expand_dims(single_img, axis=0)
# Получаем предсказание от модели (вероятности для каждого класса)
prediction = model.predict(single_img_batch)
# Определяем класс с максимальной вероятностью
predicted_class = np.argmax(prediction, axis=1)[0]
print("Тип пробы:", predicted_class)| Описание подзадачи | Баллы за подзадачу |
|---|---|
| Транспортировка пробы | 2 |
| Осмотр пробы с разных ракурсов | 4 |
| Сбор статистики по имеющимся в лаборатории пробам | 7 |
| Определение типа конкретной пробы | 7 |
| Сумма за все подзадачи | 20 |
Необходимо изучить образец БПЛА и соединить электронные модули аналогичным образом. После подключения всех модулей продемонстрировать работу базового программного кода.
Для выполнения подзадачи необходимо:
- показать разработчику профиля скоммутированные электронные модули и получить разрешение на подключение аккумулятора и запуск программ,
подключиться к квадрокоптеру по SSH и ввести команду:
textroslaunch gs_example test_led.launch --screen
1 балл — базовый код работает (светодиодная подсветка загорается зеленым, красным, синим и фиолетовым цветами поочередно).
Комментарии
Выполнив это подзадание, участники убеждаются в исправности оборудования и работоспособности базового программного кода, а также осваивают умения, необходимые для дальнейшей работы с квадрокоптером:
- установка аккумуляторов;
- включение питания систем беспилотника;
- передача файлов на бортовой компьютер;
- управление операционной системой бортового компьютера;
- запуск программ на бортовом компьютере.
Задание является обязательным для выполнения всеми участниками, его выполнение гарантирует, что они располагают исправным оборудованием и минимальными необходимыми навыками для работы.
Типовые ошибки при выполнении подзадачи:
- шлейф видеокамеры не до конца защелкнут в разъем видеокамеры квадрокоптера;
- не до конца защелкнут шлейф в разъем Micro-Match, соединяющий полетный контроллер «Геоскан Пионер» и модуль ультразвуковой навигации.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения задачи необходимо:
- безошибочно подключить соединительные провода к электронным модулям квадрокоптера;
- подключиться к бортовому компьютеру беспилотника через SSH;
- скопировать файлы базового программного кода на бортовой компьютер и запустить их для исполнения.
Эти действия выполняются по предоставленным инструкциям.
Порядок действий:
- Участники выбирают, какие типы поврежденных участков дороги необходимо обнаружить.
- Организатор случайным образом размещает от 2 до 6 поврежденных участков дороги в полетной зоне квадрокоптера.
- Квадрокоптер устанавливается на стартовую площадку.
- По команде организатора участники запускают программу.
- Квадрокоптер должен взлететь, облететь всю дорожную сеть, вывести в терминал число поврежденных участков дороги, приземлиться на крыше здания.
Подзадача считается полностью решенной, если квадрокоптер последовательно выполнил следующие действия:
- взлетел со стартовой площадки на произвольную высоту;
- облетел всю доступную дорожную сеть и вывел в терминал число поврежденных участков дороги;
- приземлился на крыше здания и после полной остановки остался в ее пределах.
- 1 балл — за взлет.
- 1 балл — за вывод правильного числа поврежденных участков дороги.
- +1 балл — за каждый выбранный участниками тип поврежденных участков.
- 2 балла — за посадку.
Типовые ошибки при выполнении подзадачи:
- совмещение логики полета и логики детектирования повреждений в одном узле;
- обработка всех кадров видеопотока при полете,
- использование тяжеловесных нейросетевых классификаторов;
- отсутствие фильтрации одинаковых объектов;
- непрерывный вывод количества повреждений.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения задачи требуется разработать два узла в системе ROS. Первый узел будет отвечать за управление перемещением квадрокоптера (далее — полетное задание), а второй — за распознавание и подсчет поврежденных участков дорожного покрытия.
Дрон будет перемещаться в системе координат ультразвуковой навигационной системы «Геоскан Локус 2», поэтому для составления маршрута полета необходимо задать определенные точки. Они должны быть расположены таким образом, чтобы фотографии, сделанные в этих точках, имели частичное перекрытие с предыдущими кадрами. Такой подход необходим для последующей фильтрации обнаруженных повреждений, которые могут встречаться на соседних кадрах.
Для определения необходимых координат можно использовать самый простой метод – измерение их вручную, перемещая квадрокоптер по полигону. Текущие координаты квадрокоптера можно получить, выполнив следующую команду в SSH-терминале:
rostopic echo /geoscan/navigation/local/positionПосле выполнения измерений координаты следует вставить в полетное задание.
Необходимо организовать связь между двумя узлами. Оптимальным способом связи является использование сервиса. Узел распознавания будет выступать в роли сервера сервиса, а узел полетного задания — клиентом. При достижении очередной точки маршрута узел полетного задания будет отправлять запрос на обработку кадра.
Следует разработать сервис для вывода статистики полета, включая количество поврежденных участков дорожного покрытия.
Код полетного задания.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rospy
from rospy import ServiceProxy
from std_srvs.srv import Empty, Trigger
from gs_flight import FlightController, CallbackEvent
from gs_board import BoardManager
from gs_navigation import NavigationManager
rospy.init_node("flight_test_node") # инициализируем узел
# получаем координаты стартовой точки
nav = NavigationManager()
HOME_POINT = nav.lps.position()
HOME_POINT.z += 1.0
HOME_POINT = [HOME_POINT.x, HOME_POINT.y, HOME_POINT.z]
coordinates = [ # массив координат точек
HOME_POINT,
... # необходимо вставить замеренные точки в формате [x, y, z]
HOME_POINT
]
run = True # переменная отвечающая за работу программы
position_number = 0 # счетчик пройденных точек
def callback(event): # функция обработки событий Автопилота
global ap
global run
global coordinates
global position_number
global detect_client
global stat_client
event = event.data
if event == CallbackEvent.ENGINES_STARTED: # блок обработки события запуска двигателя
print("engine started")
ap.takeoff() # отдаем команду взлета
elif event == CallbackEvent.TAKEOFF_COMPLETE: # блок обработки события завершения взлета
print("takeoff complete")
position_number = 0
ap.goToLocalPoint(coordinates[position_number][0], coordinates[position_number][1], coordinates[position_number][2]) # отдаем команду полета в точку
elif event == CallbackEvent.POINT_REACHED: # блок обработки события достижения точки
print(f"point {position_number} reached")
detect_client()
position_number += 1 # наращиваем счетчик точек
if position_number < len(coordinates): # проверяем количество текущее количество точек с количеством точек в полетном задании
ap.goToLocalPoint(coordinates[position_number][0], coordinates[position_number][1], coordinates[position_number][2]) # отдаем команду полета в точку
else:
ap.landing() # отдаем команду посадки
elif event == CallbackEvent.COPTER_LANDED: # блок обработки события приземления
print("finish programm")
run = False # прекращем программу
response = stat_client()
print(f"Кол-во поврежденных участков {response.message}")
detect_client = ServiceProxy("/get_photo", Empty) # клиент сервиса распознавания
stat_client = ServiceProxy("/get_stat", Trigger)
board = BoardManager() # создаем объект бортового менеджера
ap = FlightController(callback) # создаем объект управления полета
once = False # переменная отвечающая за первое вхождение в начало программы
while not rospy.is_shutdown() and run:
if board.runStatus() and not once: # проверка подлкючения RPi к Пионеру
print("start programm")
ap.preflight() # отдаем команду выполенения предстартовой подготовки
once = TrueДля определения поврежденных участков требуется обучить нейросетевой классификатор Yolo v4-tiny.
Алгоритм работы узла детекции следующий:
- После вызова сервиса распознавания производится получение изображения с камеры.
- Осуществляется конвертирование в формат, совместимый с классификатором.
- Выполняется распознавание объектов.
- Выбирается наиболее вероятный класс на изображении.
Из условия задачи следует, что на одном участке дороги может быть только одно повреждение, что позволяет сузить область поиска. После этого происходит сравнение с объектами, обнаруженными на предыдущем кадре.
Если объекты совпадают, алгоритм считает, что это тот же самый объект; в противном случае в массив объектов добавляется метка класса нового объекта. При вызове сервиса статистики производится подсчет количества ненулевых значений в массиве детекции, после чего возвращается итоговый результат.
Программный код узла распознавания приведен ниже.
import rospy
from sensor_msgs.msg import Image
from std_srvs.srv import Empty, EmptyResponse
from std_srvs.srv import Trigger, TriggerResponse
import cv2
from cv_bridge import CvBridge
from rospy import Service
import numpy as np
rospy.init_node("detect_node") # инициализируем узел
bridge = CvBridge() # создаем объект преобразования сообщений ROS в OpenCV
weights_path = "yolov4-tiny-obj_best.weights"
config_path = "yolov4-tiny-obj.cfg"
net = cv2.dnn.readNet(config_path, weights_path)
yolo_model = cv2.dnn.DetectionModel(net)
all_object = []
# Выдает самый вероятный объект на изображении
def get_most_probable_class(class_ids, confidences):
if len(class_ids) == 0 or len(confidences) == 0:
return None
most_probable_index = np.argmax(confidences)
return class_ids[most_probable_index]
# Считает количество элементов в списке, которые не равны None.
def count_not_none(all_objects):
return len(list(filter(lambda x: x is not None, all_objects)))
def detect_handler(request):
global bridge
global yolo_model
global all_object
image_msg = rospy.wait_for_message("/pioneer_max_camera/image_raw", Image)
try:
cv_image = bridge.imgmsg_to_cv2(image_msg, "bgr8")
class_ids, scores, boxes = yolo_model.detect(cv_image, 0.6, 0.4)
most_class = get_most_probable_class(class_ids, scores)
if (most_class is None) or (len(all_object) == 0):
all_object.append(most_class)
elif most_class == all_object[-1]:
all_object.append(None)
else:
all_object.append(most_class)
except:
pass
return EmptyResponse()
def stat_handler(request):
global all_object
response = TriggerResponse()
response.success = True
response.message = str(count_not_none(all_object))
return response
detect_server = Service("/get_photo", Empty, detect_handler) # создаем сервис для получения фотографии
stat_server = Service("/get_stat", Trigger, stat_handler)
rospy.spin()Порядок действий:
- Участники выбирают, какие типы поврежденных участков дороги необходимо распознать.
- Организатор случайным образом размещает от четырех поврежденных участков дороги в полетной зоне квадрокоптера.
- Квадрокоптер устанавливается на стартовую площадку.
- По команде организатора участники запускают программу.
Подзадача считается полностью решенной, если квадрокоптер последовательно выполнил следующие действия:
- взлетел со стартовой площадки на произвольную высоту;
- обнаружил все поврежденные участки и в момент обнаружения каждого участка вывел в консоль его тип;
- приземлился на крыше здания и после полной остановки остался в пределах посадочной площадки.
- 1 балл — за каждый обнаруженный участок с правильно определенным типом.
- 1 балл — за каждый выбранный участниками тип поврежденных участков.
- 4 балла — за посадку.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для решения подзадачи необходимо внести изменения в полетное задание из БПЛА-1, исключив вывод статистики поиска объектов, а также модифицировать узел обнаружения повреждений. В функции detect_handler узла обнаружения, после добавления обнаруженного объекта в массив всех найденных объектов, следует добавить следующий код для вывода распознанного повреждения.
if all_object[-1] is not None:
print(f"Обнаруженный тип повреждения: {all_object[-1]}")Необходимо удалить сервис статистики.
Код измененного полетного задания.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rospy
from rospy import ServiceProxy
from std_srvs.srv import Empty
from gs_flight import FlightController, CallbackEvent
from gs_board import BoardManager
from gs_navigation import NavigationManager
rospy.init_node("flight_test_node") # инициализируем узел
# получаем координаты стартовой точки
nav = NavigationManager()
HOME_POINT = nav.lps.position()
HOME_POINT.z += 1.0
HOME_POINT = [HOME_POINT.x, HOME_POINT.y, HOME_POINT.z]
coordinates = [ # массив координат точек
HOME_POINT,
... # необходимо вставить измеренные точки в формате [x, y, z]
HOME_POINT
]
run = True # переменная отвечающая за работу программы
position_number = 0 # счетчик пройденных точек
def callback(event): # функция обработки событий Автопилота
global ap
global run
global coordinates
global position_number
global detect_client
event = event.data
if event == CallbackEvent.ENGINES_STARTED: # блок обработки события запуска двигателя
print("engine started")
ap.takeoff() # отдаем команду взлета
elif event == CallbackEvent.TAKEOFF_COMPLETE: # блок обработки события завершения взлета
print("takeoff complete")
position_number = 0
ap.goToLocalPoint(coordinates[position_number][0], coordinates[position_number][1], coordinates[position_number][2]) # отдаем команду полета в точку
elif event == CallbackEvent.POINT_REACHED: # блок обработки события достижения точки
print(f"point {position_number} reached")
detect_client()
position_number += 1 # наращиваем счетчик точек
if position_number < len(coordinates): # проверяем количество текущее количество точек с количеством точек в полетном задании
ap.goToLocalPoint(coordinates[position_number][0],
coordinates[position_number][1],
coordinates[position_number][2]) # отдаем команду полета в точку
else:
ap.landing() # отдаем команду посадки
elif event == CallbackEvent.COPTER_LANDED: # блок обработки события приземления
print("finish programm")
run = False # прекращем программу
detect_client = ServiceProxy("/get_photo", Empty) # клиент сервиса распознавания
board = BoardManager() # создаем объект бортового менеджера
ap = FlightController(callback) # создаем объект управления полета
once = False # переменная отвечающая за первое вхождение в начало программы
while not rospy.is_shutdown() and run:
if board.runStatus() and not once: # проверка подключения RPi к Пионеру
print("start programm")
ap.preflight() # отдаем команду выполнения предстартовой подготовки
once = True
passПод картой подразумевается набор данных, позволяющий построить изображение полигона с отмеченными поврежденными участками дорог. У каждого участка необходимо:
- обозначить тип повреждений;
- указать порядковый номер;
- отметить число посещений беспилотным автомобилем.
Поврежденные участки должны быть обозначены так, чтобы было ясно, на какой стороне дороги повреждение и с точностью до одного пунктирного штриха разметки понятно его положение.
Порядок действий:
- Участники сообщают, какие типы участков дороги обнаруживает и распознает их квадрокоптер.
- Организатор случайным образом размещает четыре поврежденных участка дороги в полетной зоне квадроптера.
- Квадрокоптер устанавливается на стартовую площадку.
- По команде организатора участники запускают программу.
Подзадача считается полностью решенной, если последовательно выполнены следующие действия:
- БПЛА взлетел со стартовой площадки на произвольную высоту;
- квадрокоптер облетел всю доступную дорожную сеть;
- БПЛА приземлился на крыше здания и после полной остановки остался в ее пределах;
- на компьютере оператора появилась карта полигона, соответствующая реальному расположению участков.
- +1 балл — за каждый участок, верно обозначенный на карте, учитывается положение участка и его тип.
- +1 балл — за каждый выбранный участниками тип поврежденных участков.
- 2 балла — за посадку.
Должны быть предоставлены три набора статистических данных.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Участникам было предоставлено изображение полигона \(1208 \times 889\) px (пикселей).
Красным прямоугольником выделена полетная зона квадрокоптера.
Для выполнения задачи необходимо выполнить привязку координат ультразвуковой навигационной системы к пикселям изображения. Размер зоны задается системой навигации «Геоскан Локус» в метрах, где 0 координат находится в нижнем левом углу, ось X направлена горизонтально, а ось Y — вертикально.
Полетная зона имеет размеры \(3 \times 6\) м. Следовательно, длина 1 px (пикселя) изображения составляет приблизительно 0,0067 м в системе координат ультразвуковой навигации. Эта величина является константой и должна использоваться для расчета местоположения повреждения.
Для точного указания координат объекта требуется модификация функции его поиска таким образом, чтобы она возвращала смещение центра объекта относительно центра камеры. Полученные данные необходимо перевести в метры и прибавить к текущим координатам квадрокоптера.
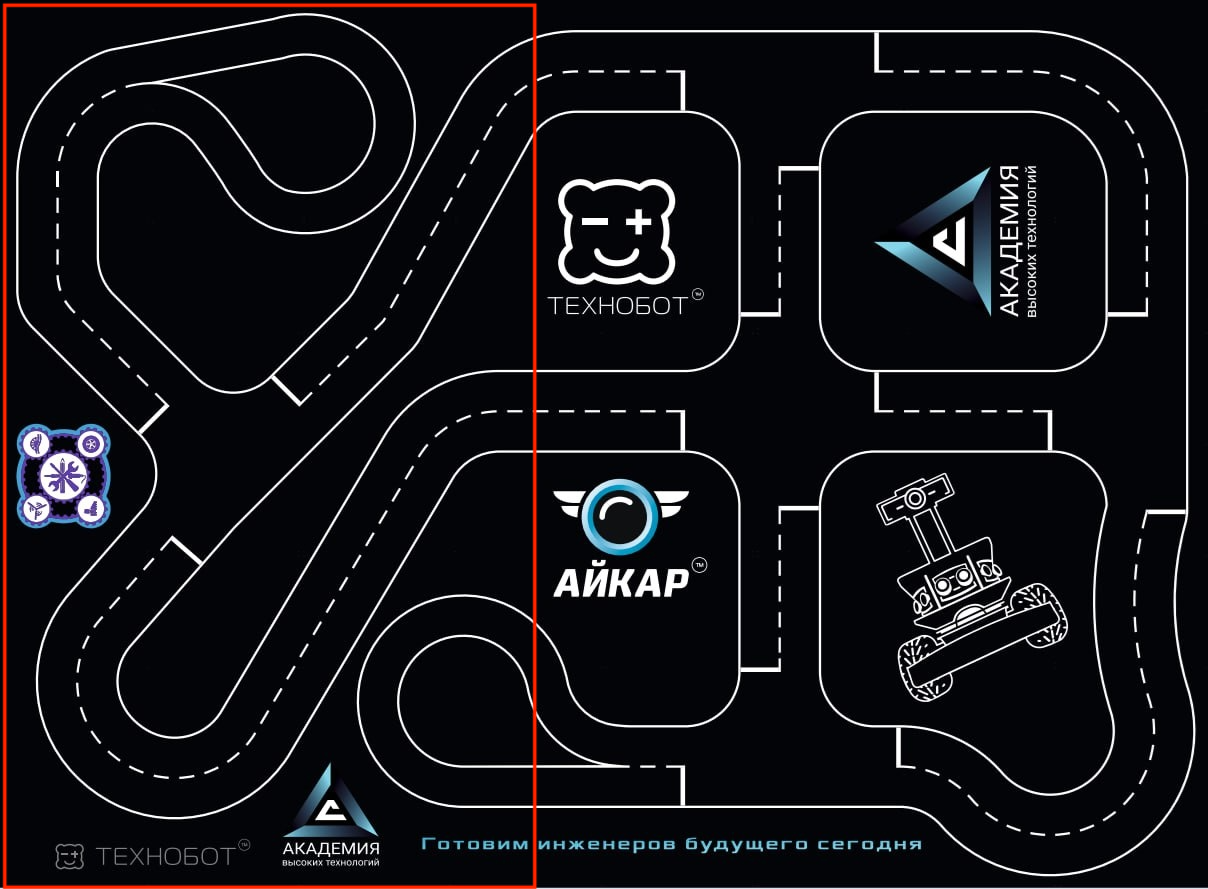
Модифицированная функция поиска объекта.
# Выдает самый вероятный объект на изображении и координаты центра объекта относительно центра изображения с камеры
def get_most_probable_class(class_ids, confidences, boxes, image_shape):
if len(class_ids) == 0 or len(confidences) == 0 or len(boxes) == 0:
return None, None, None # Если объекты не найдены, возвращаем (None, None, None)
# Находим индекс максимальной уверенности
most_probable_index = np.argmax(confidences)
# Получаем соответствующий class_id и box
class_id = class_ids[most_probable_index]
box = boxes[most_probable_index]
# Рассчитываем центр рамки
x, y, w, h = box # Координаты рамки: (x, y, ширина, высота)
box_center_x = x + w / 2
box_center_y = y + h / 2
# Рассчитываем центр изображения
image_height, image_width = image_shape
image_center_x = image_width / 2
image_center_y = image_height / 2
# Рассчитываем смещение центра рамки относительно центра изображения
center_offset_x = box_center_x - image_center_x
center_offset_y = box_center_y - image_center_y
center_offset = (center_offset_x, center_offset_y)
return class_id, center_offsetНеобходимо разработать функцию для перевода смещения из пикселей в метры. Для этого следует использовать высоту квадрокоптера в момент съемки, а также угол обзора камеры. На квадрокоптере «Геоскан Пионер» в модификации НТО установлена камера Raspberry Pi Camera Module 2, которая имеет следующие углы обзора: вертикальный угол – 48,8°, горизонтальный угол – 62,2°.
Функция конвертации смещения из пикселей в метры будет использовать данные о высоте квадрокоптера и углах обзора камеры.
Функция конвертации смещения из пикселей в метры.
def convert_pixels_to_meters(pixel_offset_x, pixel_offset_y, camera_height, camera_fov_h, camera_fov_v):
# Переводим углы обзора из градусов в радианы
fov_h_rad = np.radians(camera_fov_h)
fov_v_rad = np.radians(camera_fov_v)
# Рассчитываем фокусные расстояния камеры в пикселях
focal_length_h = camera_height / np.tan(fov_h_rad / 2)
focal_length_v = camera_height / np.tan(fov_v_rad / 2)
# Переводим смещение из пикселей в метры
x_meters = (pixel_offset_x * camera_height) / focal_length_h
y_meters = (pixel_offset_y * camera_height) / focal_length_v
return x_meters, y_metersДля создания карты недостаточно сохранять только метку класса объекта, необходимо фиксировать и его положение. Для хранения карты необходимо использовать сервер из БПА-4. Функция упаковки данных в словарь.
from gs_navigation import NavigationManager
PIXEL_CONST = 0.0067
# Инициализирует NavigationManager для получения координат
nav = NavigationManager()
# Создает словарь с классом и смещением
def create_dict(class_id, object_offset, number):
global nav
if class_id is None:
return None
else:
position = nav.lps.position()
object_offset_x, object_offset_y = convert_pixels_to_meters(
*object_offset,
position.z,
62.2,
48.8
)
return {
"type": class_id,
"number": number,
"count" : 0,
"x": (object_offset_x + position.x) / PIXEL_CONST,
"y": (object_offset_y + position.y) / PIXEL_CONST
}Модифицированная функция детектирования объекта.
# Считает количество элементов в списке, которые не равны None.
def count_not_none(all_objects):
return len(list(filter(lambda x: x is not None, all_objects)))
def detect_handler(request):
global bridge
global yolo_model
global all_object
image_msg = rospy.wait_for_message("/pioneer_max_camera/image_raw", Image)
try:
cv_image = bridge.imgmsg_to_cv2(image_msg, "bgr8")
class_ids, scores, boxes = yolo_model.detect(cv_image, 0.6, 0.4)
most_class, object_offset = get_most_probable_class(
class_ids,
scores,
boxes,
cv_image.shape
)
object_dict = create_dict(
most_class,
object_offset,
count_not_none(all_object)
)
if (object_dict is None) or (len(all_object) == 0):
all_object.append(object_dict)
elif all_object[-1] is None:
all_object.append(object_dict)
elif object_dict["type"] == all_object[-1]["type"]:
all_object.append(None)
else:
all_object.append(object_dict)
if all_object[-1] is not None:
print(f"Обнаруженный тип повреждения: {all_object[-1]}")
except:
pass
return EmptyResponse()Функция отправки данных на сервер:
import requests
SERVER_URL = "http://172.16.65.50:8000"
def send_points(points):
ans = requests.post(f"{SERVER_URL}/points", json=points)
if ans.status_code != 200:
return False
return ans.json()["status"] == "OK"Необходимо создать сервис, который будет отправлять данные на сервер после окончания посадки для обновления карты.
def send_points_handler(request):
global all_object
send_points(all_object)
return EmptyResponse()
send_points_server = Service("/send_points", Empty, send_points_handler) # создаем сервис для отправки точекСледует изменить код полетного задания, чтобы после посадки совершалась отправка данных на сервер (корректировка коснется только функции обработки событий автопилота).
def callback(event): # функция обработки событий Автопилота
global ap
global run
global coordinates
global position_number
global detect_client
event = event.data
if event == CallbackEvent.ENGINES_STARTED: # блок обработки события запуска двигателя
print("engine started")
ap.takeoff() # отдаем команду взлета
elif event == CallbackEvent.TAKEOFF_COMPLETE: # блок обработки события завершения взлета
print("takeoff complete")
position_number = 0
ap.goToLocalPoint(coordinates[position_number][0],
coordinates[position_number][1],
coordinates[position_number][2]) # отдаем команду полета в точку
elif event == CallbackEvent.POINT_REACHED: # блок обработки события достижения точки
print(f"point {position_number} reached")
detect_client()
position_number += 1 # наращиваем счетчик точек
if position_number < len(coordinates): # проверяем количество текущее количество точек с количеством точек в полетном задании
ap.goToLocalPoint(coordinates[position_number][0],
coordinates[position_number][1],
coordinates[position_number][2]) # отдаем команду полета в точку
else:
ap.landing() # отдаем команду посадки
elif event == CallbackEvent.COPTER_LANDED: # блок обработки события приземления
print("finish programm")
send_points_client()
run = False # прекращем программу
send_points_client = ServiceProxy("/send_points", Empty) # клиент сервиса распознаванияПорядок действий:
- Участники демонстрируют организатору карту полигона с возможностью ручного добавления и удаления поврежденных участков дороги (участки на карте должны быть пронумерованы).
- Организатор случайным образом размещает на полигоне поврежденные участки.
- Участники наносят поврежденные участки на карту.
- Квадрокоптер устанавливается на стартовую площадку.
- По команде организатора участники запускают программу.
- Организатор сообщает номер участка, данные о котором необходимо обновить.
- Участники передают номер участка в программу через стандартный поток ввода.
- Квадрокоптер должен сфотографировать поврежденный участок и передать его фото MQTT-серверу на обработку.
- Обработанное фото направляется в ответ.
- На компьютере оператора выводится исходное и обработанное фото.
Подзадача считается полностью решенной, если последовательно выполнены следующие условия:
- БПЛА взлетел со стартовой площадки на произвольную высоту;
- квадрокоптер долетел и завис над выбранным участком;
- на компьютере оператора отобразились исходное и обработанное изображение (центр исходного изображения находится в пределах поврежденного участка дороги);
- БПЛА приземлился на крыше здания и после полной остановки остался в ее пределах.
- 4 балла — на компьютере оператора выведено изображение целевого участка.
- 2 балла — за посадку.
Должен быть предоставлен один набор статистических данных.
Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для выполнения подзадачи следует внести изменения в сервер, разработанный в рамках подзадачи БПА-4. Требуется добавить функцию постановки задачи квадрокоптеру и получения этой задачи, а также функцию добавления и сохранения изображений, необходимых для выполнения подзадачи.
class ImageRequest(BaseModel):
original: str
processed: str
last_images = None
@app.post("/copter_task")
async def post_copter_task(request: PointsRequest):
global copter_task
copter_task = request
return {"status": "OK", "detail": None}
@app.get("/copter_task")
async def get_copter_task():
global copter_task
return {"status": "OK", "detail": copter_task}
@app.post("/images")
async def post_images(request: ImageRequest):
global last_images
last_images = request
return {"status": "OK", "detail": None}
@app.get("/images")
async def get_images():
global last_images
return {"status": "OK", "detail": last_images}Необходимо модифицировать код приложения карты, разработанного в рамках подзадачи БПА-5. Требуется добавить функции отправки данных о полетной задаче на сервер в класс Server.
def post_copter_task(self, task: dict) -> bool:
ans = requests.post(f"{self.base_url}/copter_task", json=task)
if ans.status_code != 200:
return False
return ans.json()["status"] == "OK"Далее нужно изменить функцию mouse_callback, переназначив правую кнопку мыши на отправку задания квадрокоптеру.
if event == cv2.EVENT_RBUTTONDOWN:
id = input("Введите id точки")
map_point = server.get_points()
task = None
for point in map_point:
if point["id"] == id:
task = point
if task is not None:
server.post_copter_task(task)В полетном задании перед запуском двигателя необходимо добавить ожидание полетной задачи. Изменения приведены ниже.
import requests
coordinates = [
HOME_POINT
]
def callback(event): # функция обработки событий Автопилота
global ap
global run
global coordinates
global position_number
global detect_client
event = event.data
if event == CallbackEvent.ENGINES_STARTED: # блок обработки события запуска двигателя
print("engine started")
ap.takeoff() # отдаем команду взлета
elif event == CallbackEvent.TAKEOFF_COMPLETE: # блок обработки события завершения взлета
print("takeoff complete")
position_number = 0
ap.goToLocalPoint(coordinates[position_number][0], coordinates[position_number][1], coordinates[position_number][2]) # отдаем команду полета в точку
elif event == CallbackEvent.POINT_REACHED: # блок обработки события достижения точки
print(f"point {position_number} reached")
position_number += 1 # наращиваем счетчик точек
if position_number < len(coordinates): # проверяем количество текущее количество точек с количеством точек в полетном задании
ap.goToLocalPoint(coordinates[position_number][0],
coordinates[position_number][1],
coordinates[position_number][2]) # отдаем команду полета в точку
elif position_number == len(coordinates):
detect_client()
ap.goToLocalPoint(*HOME_POINT)
else:
ap.landing() # отдаем команду посадки
elif event == CallbackEvent.COPTER_LANDED: # блок обработки события приземления
print("finish programm")
send_points_client()
run = False # прекращаем программу
SERVER_URL = "http://172.16.65.50:8000"
def get_copter_task():
ans = requests.get(f"{SERVER_URL}/copter_task")
if ans.status_code != 200:
return None
return ans.json()["detail"]
PIXEL_CONST = 0.0067
while not rospy.is_shutdown() and run:
if board.runStatus() and not once: # проверка подключения RPi к Пионеру
print("start programm")
while True:
task = get_copter_task()
if task is not None:
coordinates.append([task["x"] * PIXEL_CONST, task["y"] * PIXEL_CONST, HOME_POINT[2]])
break
ap.preflight() # отдаем команду выполнения предстартовой подготовки
once = True
passНеобходимо внести изменения в узел обнаружения дефектов. Требуется удалить функциональность сохранения объектов и добавить запрос к MQTT-серверу для получения обработанного изображения, а также реализовать отправку изображения на общий сервер. Функция отправки двух изображений на общий сервер.
import base64
def send_image_to_server(original_image, processed_image):
# Кодируем исходное изображение в JPEG
_, buffer_orig = cv2.imencode('.jpg', original_image)
# Кодируем обработанное изображение в JPEG
_, buffer_proc = cv2.imencode('.jpg', processed_image)
# Конвертируем в base64
img_orig_base64 = base64.b64encode(buffer_orig).decode('utf-8')
img_proc_base64 = base64.b64encode(buffer_proc).decode('utf-8')
# Отправляем на сервер
response = requests.post(
f"{SERVER_URL}/images",
json={
"original": img_orig_base64,
"processed": img_proc_base64
}
)
return response.status_code == 200Исправленная функция сервиса детекции.
def detect_handler(request):
global bridge
image_msg = rospy.wait_for_message("/pioneer_max_camera/image_raw", Image)
try:
cv_image = bridge.imgmsg_to_cv2(image_msg, "bgr8")
client.send(cv_image)
output = client.get_output()
if output is not None:
send_image_to_server(cv_image, output)
except Exception as e:
print(f"Ошибка в detect_handler: {str(e)}")
return EmptyResponse()Необходимо разработать скрипт, который будет запускаться на компьютере оператора и выводить изображения, полученные с квадрокоптера. Код программы приведен ниже.
import cv2
import numpy as np
import requests
import base64
import time
SERVER_URL = "http://172.16.65.50:8000"
def base64_to_image(base64_string):
# Декодируем base64 строку в байты
img_data = base64.b64decode(base64_string)
# Преобразуем байты в numpy массив
nparr = np.frombuffer(img_data, np.uint8)
img = cv2.imdecode(nparr, cv2.IMREAD_COLOR)
return img
def main():
# URL сервера
while True:
try:
# Получаем данные с сервера
response = requests.get(f"{SERVER_URL}/images")
data = response.json()
if data["status"] == "OK" and data["detail"] is not None:
# Получаем изображения
original_img = base64_to_image(data["detail"]["original"])
processed_img = base64_to_image(data["detail"]["processed"])
# Создаем окно с двумя изображениями рядом
combined = np.hstack((original_img, processed_img))
# Показываем изображения
cv2.imshow("Original and Processed Images", combined)
# Ждем нажатия клавиши (1 мс)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# Небольшая задержка перед следующим запросом
time.sleep(0.1)
except Exception as e:
print(f"Ошибка: {e}")
time.sleep(1) # Ждем секунду перед повторной попыткой
cv2.destroyAllWindows()
if __name__ == "__main__":
main()Файлы с решениями подзадач находятся в папке: https://disk.yandex.ru/d/NJ2o0pOxDW162A.
Для совместного запуска устройств необходимо добавить функцию записи и передачи логического флага, который будет указывать, что необходимо запустить все устройства. Изменения будут реализованы относительно сервера, разработанного в подзадаче БПЛА-5.
class BooleanRequest(BaseModel):
value: bool
start_value = False
@app.post("/start")
async def post_start(request: BooleanRequest):
global start_value
start_value = request.value
return {"status": "OK", "detail": None}
@app.get("/start")
async def get_start():
global start_value
return {"status": "OK", "detail": start_value}В код полетного задания квадрокоптера необходимо добавить получение логического флага старта. Требуется реализовать функцию запроса флага и модифицировать основной цикл полетного задания, пример для которого приведен в подзадаче БПЛА-5.
def get_start():
ans = requests.get(f"{SERVER_URL}/start")
if ans.status_code != 200:
return False
return ans.json()["detail"]
while not rospy.is_shutdown() and run:
if board.runStatus() and not once: # проверка подключения RPi к Пионеру
print("start programm")
while True:
if get_start(): # ожидаем сигнала старта
task = get_copter_task()
if task is not None:
coordinates.append([task["x"] * PIXEL_CONST, task["y"] * PIXEL_CONST, HOME_POINT[2]])
break
rospy.sleep(0.1) # небольшая задержка между проверками
ap.preflight() # отдаем команду выполнения предстартовой подготовки
once = True
passДля отправки команды старта с компьютера оператора можно использовать приведенную ниже программу, которая ожидает ввода команды с клавиатуры.
import requests
SERVER_URL = "http://172.16.65.50:8000"
def send_start_command():
try:
response = requests.post(f"{SERVER_URL}/start", json={"value": True})
if response.status_code == 200:
print("Команда старта успешно отправлена")
return True
else:
print(f"Ошибка при отправке команды: {response.status_code}")
return False
except Exception as e:
print(f"Ошибка при отправке команды: {e}")
return False
def main():
print("Ожидание ввода команды 'start'...")
while True:
command = input("Введите команду: ").strip().lower()
if command == "start":
if send_start_command():
print("Программа завершена")
break
elif command == "exit":
print("Программа завершена")
break
else:
print("Неизвестная команда. Используйте 'start' или 'exit'")
if __name__ == "__main__":
main()- Программа подготовки к профилю «Автономные транспортные системы» Национальной технологической олимпиады [Электронный ресурс]. — Режим доступа: https://avt.global/nto_program.
- Задачи профиля «Автономные транспортные системы», 2022–2023 [Электронный ресурс]. — Режим доступа: https://ntcontest.ru/docs/ats-assignements1.pdf.
- Задачи профиля «Автономные транспортные системы», 2021–2022 [Электронный ресурс]. — Режим доступа: https://ntcontest.ru/docs/ats-assignements.pdf.
- Задачи профиля «Автономные транспортные системы», 2020–2021 [Электронный ресурс]. — Режим доступа: https://drive.google.com/file/d/1jJwI_5MgX-wvmwK7WUh_mhQrEcFAhB_K/view.
- Руководство по OpenCV [Электронный ресурс]. — Режим доступа: https://docs.opencv.org/4.x/d9/df8/tutorial_root.html.
- SDK для программирования квадрокоптера Пионер модификации НТО [Электронный ресурс]. — Режим доступа: https://github.com/geoscan/geoscan_pioneer_max.





